سطحسنج چیست؟ راهنمای جامع انتخاب، نصب و کالیبراسیون


فهرست مطالب
۱. مفاهیم پایه: سطحسنج چیست و چرا در صنعت حیاتی است؟
تعریف دقیق و طبقهبندی روشهای اندازهگیری سطح
سطحسنج (Level Sensor) یا به تعبیر دقیقتر ترانسمیتر سطح (Level Transmitter)، دستگاهی است که موقعیت سطح یک ماده — مایع، جامد دانهای یا لجن — را در یک محفظه یا مخزن اندازه گرفته و این مقدار را به یک سیگنال استاندارد خروجی (معمولاً ۴ تا ۲۰ میلیآمپر) تبدیل میکند. این سیگنال سپس توسط PLC، DCS یا سیستم SCADA برای کنترل فرایند استفاده میشود.
از منظر تئوریک، اندازهگیری سطح یکی از مسائل بنیادین تجهیزات اندازهگیری سطح در مهندسی فرایند است. بهنظر میرسد این اندازهگیری باید ساده باشد — فاصله بین کف مخزن و سطح ماده را بسنج. اما واقعیت اجرایی در محیطهای صنعتی چیز دیگری است: دما ممکن است به ۴۰۰ درجه سانتیگراد برسد، فشار به ۲۵۰ بار، ماده مورد اندازهگیری ممکن است اسید غلیظ، کف، دوغاب جامد یا گاز مایع باشد و هر تماس فیزیکی دستگاه با محصول، خطر خوردگی، آلودگی یا انفجار ایجاد کند.
روشهای اندازهگیری سطح را میتوان در دو دسته اصلی طبقهبندی کرد:
روشهای تماسی (Contact Methods): دستگاه با سیال یا ماده تماس مستقیم دارد. این دسته شامل فلوتر مکانیکی، الکترودهای هدایتی (Conductive)، سطحسنجهای ارتعاشی (Vibrating Fork)، سطحسنج خازنی، رادار موج هدایتشونده (GWR) و سطحسنجهای هیدرواستاتیک است.
روشهای غیرتماسی (Non-Contact Methods): دستگاه هیچ تماسی با سیال ندارد و از فاصله اندازه میگیرد. این دسته شامل سطحسنج اولتراسونیک، رادار غیرتماسی (FMCW)، سطحسنج لیزری (LiDAR) و سطحسنجهای تشعشعی (Nuclear/Radiometric) است.
در میان تمام این روشها، سطحسنج راداری — هم در نوع تماسی (GWR) و هم غیرتماسی (FMCW) — امروز بیشترین سهم بازار جهانی را در صنایع فرایندی دارد، چراکه بهترین تعادل را بین دقت، قابلیت اطمینان، ایمنی ذاتی و سازگاری با محیطهای خشن ارائه میدهد.
اهمیت حیاتی کنترل سطح در صنایع فرایندی
در صنایع نفت، گاز، پتروشیمی، دارویی، غذایی و تولید مواد شیمیایی، کنترل سطح مستقیماً بر چهار حوزه حیاتی تأثیر میگذارد:
ایمنی فرایند (Process Safety): سرریز مخازن حاوی هیدروکربن، مواد سمی یا اسیدهای غلیظ میتواند منجر به انفجار، آتشسوزی یا آلودگی محیطی فاجعهبار شود. استانداردهای IEC 61511 (Safety Instrumented Systems) الزامات دقیقی برای سیستمهای اندازهگیری سطح در کاربردهای SIL-1 تا SIL-3 تعریف کرده است. یک ترانسمیتر سطح در کاربرد حفاظتی (High-High Level Trip)، در واقع آخرین مانع بین عملیات عادی و فاجعه است.
راندمان عملیاتی (Operational Efficiency): ذخیرهسازی دقیق موجودی محصول در تانکرهای بزرگ ذخیرهسازی (Tank Farm) نیازمند اندازهگیری با دقت زیر یک سانتیمتر است. یک خطای ۵ سانتیمتری در مخزن ۳۰ متری با قطر ۲۰ متر، معادل خطای بیش از ۱۵ متر مکعب مواد است — رقمی که در فرآوردههای نفتی به خسارت مالی چند صد میلیون تومانی میانجامد.
کنترل کیفیت محصول (Product Quality): در رآکتورهای شیمیایی، نسبت دقیق مواد اولیه، که مستقیماً توسط کنترل سطح تنظیم میشود، تعیینکننده کیفیت و خلوص محصول نهایی است. هرگونه انحراف در این نسبتها میتواند کل دسته تولیدی را به ضایعات تبدیل کند.
انطباق با مقررات زیستمحیطی (Environmental Compliance): آژانسهای محیطی در تمام دنیا، از جمله EPA در آمریکا و سازمان حفاظت محیط زیست در ایران، الزامات دقیقی برای کنترل نشت، سرریز و انتشار مواد آلودهکننده دارند. سیستمهای اندازهگیری سطح دقیق، ابزار اصلی رعایت این الزامات هستند.
چالشهای اساسی اندازهگیری در محیطهای صنعتی
محیطهای صنعتی یک آزمایشگاه کنترلشده نیستند. چالشهای دنیای واقعی که هر فناوری سطحسنجی باید با آنها کنار بیاید، عبارتند از:
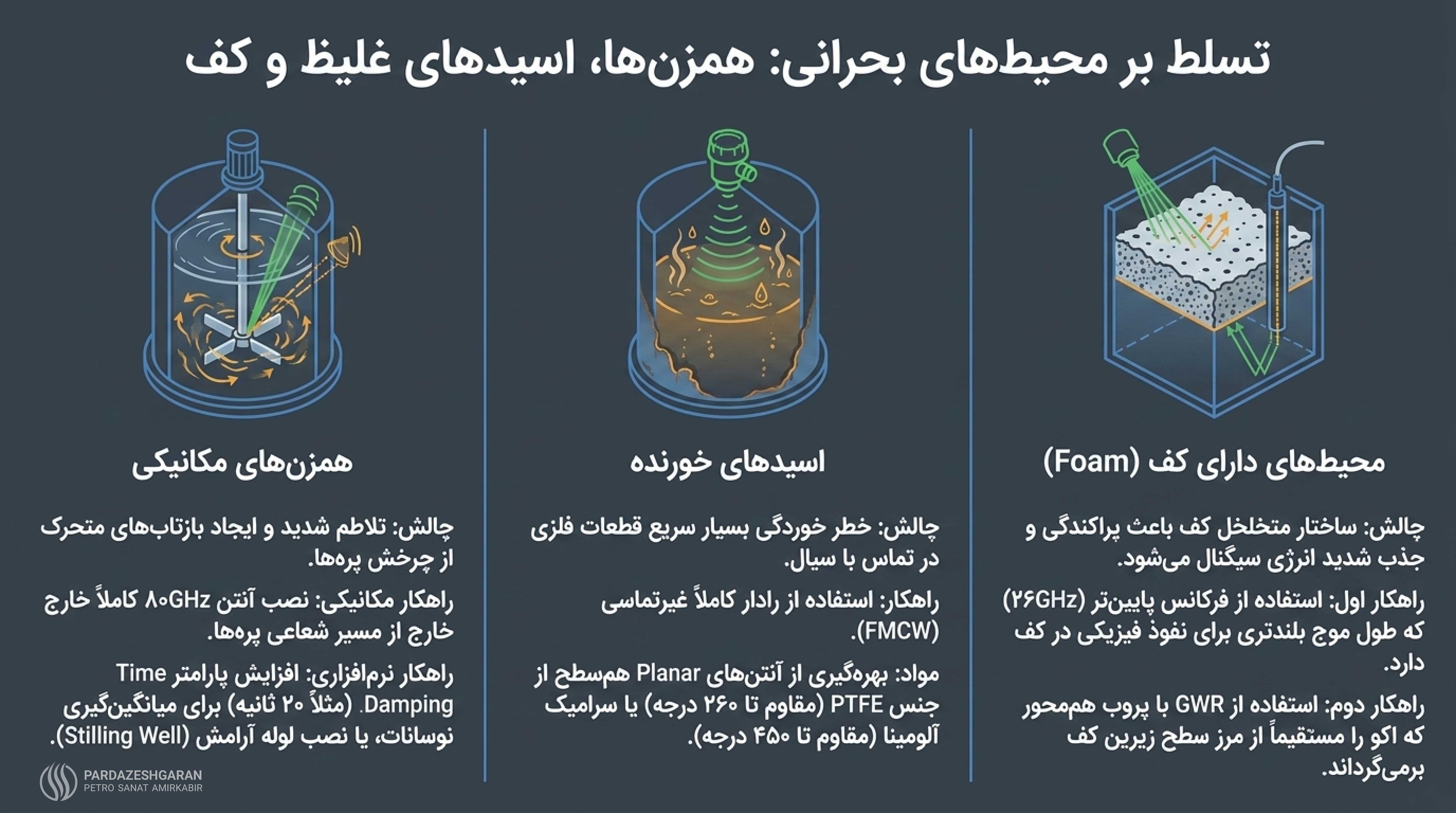
- تلاطم سطح (Turbulence): ورود پمپشده سیال، همزنهای مکانیکی (Agitator) و واکنشهای شیمیایی در داخل مخزن، سطح را به حالت مداوم متلاطم نگه میدارند و اندازهگیری یک سطح مستوی را به تقریب ریاضی تبدیل میکنند.
- تغییرات دما و فشار: در مخازن تحت فشار با دماهای متغیر، خواص فیزیکی محیط داخلی (چگالی، سرعت صوت) بهطور مداوم تغییر میکنند و کالیبراسیون ثابت را بیمعنی میسازند.
- تشکیل کف (Foam Formation): بسیاری از مایعات صنعتی در اثر اغتشاش تشکیل کف میدهند. کف یک فاز میانی است که ماهیت آن — نه کاملاً مایع، نه کاملاً گاز — برای اکثر فناوریهای سطحسنجی مشکلساز است.
- رسوبگذاری و جرمگیری: مواد چسبنده، پارافینی یا رسوبگذار روی سطح دستگاه تجمع میکنند و در صورت تماس، بهسرعت دقت و عملکرد دستگاه را مختل میسازند.
- وجود موانع داخلی: گرمخانهها (Heating Coils)، همزنها، لولههای پرکننده (Filling Pipes) و تیرکهای تقویتی داخل مخزن، منابع بازتابهای کاذب سیگنال اندازهگیری هستند.
- سیالات چندفازی (Multiphase Fluids): در مخازن جداکننده (Separator)، یک مخزن ممکن است همزمان روغن، آب و گاز داشته باشد و اندازهگیری هر فاز به تکنولوژی و تنظیمات متفاوتی نیاز داشته باشد.
۲. مقایسه تکنیکال تکنولوژیهای رایج سطحسنجی
برای درک اینکه چرا رادار در سالهای اخیر به تکنولوژی غالب در ابزار دقیق مخازن تبدیل شده، باید ابتدا تکنولوژیهای پیشین را با دیدگاه انتقادی بررسی کرد — نه از روی تبلیغات، بلکه از روی محدودیتهای فیزیکی ذاتیشان.
سطحسنج اولتراسونیک: تواناییها و محدودیتهای ذاتی
سطحسنج اولتراسونیک با ارسال پالسهای صوتی با فرکانس ۲۰ تا ۲۰۰ کیلوهرتز به سمت سطح سیال و اندازهگیری زمان بازگشت پژواک کار میکند. با دانستن سرعت صوت در هوا، فاصله تا سطح محاسبه میشود. این اصل ساده و هزینه اولیه پایین، این تکنولوژی را برای کاربردهای غیرصنعتی و نیمهصنعتی ساده جذاب کرده است.
تواناییهای واقعی: عملکرد قابل قبول در مخازن آب، محلولهای آبی رقیق، مخازن باز در دمای محیط. نصب و راهاندازی ساده. هزینه اولیه پایین.
اما محدودیتهای فیزیکی اولتراسونیک در محیطهای صنعتی، آن را بهشدت ناکارآمد میسازند:
آسیبپذیری حیاتی اول — وابستگی به سرعت صوت: سرعت صوت در هوا برابر ۳۴۳ متر بر ثانیه در دمای ۲۰ درجه است، اما این عدد با فرمول v = 331.3 × √(T/273.15) مستقیماً به دما وابسته است. در یک مخزن که دمای داخل آن بین ۰ تا ۱۰۰ درجه متغیر است، سرعت صوت بین ۳۳۱ تا ۳۸۷ متر بر ثانیه نوسان دارد — خطایی تا ۸٪ که مستقیماً به خطای اندازهگیری تبدیل میشود. گرادیان دمایی (جایی که لایههای گرم و سرد هوا درون مخزن وجود دارند) این مشکل را تشدید میکند زیرا پالس صوتی در مسیر خود با سرعتهای متفاوت حرکت میکند.
آسیبپذیری حیاتی دوم — تضعیف سیگنال در بخار و گاز: بخارات، ذرات معلق گرد و غبار، مه و هر مادهای در فاز گازی مسیر عبور امواج صوتی را مختل میکنند. امواج اولتراسونیک توسط این ذرات پراکنده (Scattering) و جذب (Absorption) میشوند. در مخازن پتروشیمی که اغلب فضای گازی بالای سطح مایع از بخارات هیدروکربنی اشباع شده، سیگنال اولتراسونیک میتواند بهقدری تضعیف شود که قابل تشخیص نباشد.
آسیبپذیری حیاتی سوم — ناتوانی در کار با فشار بالا: ترانسدیوسرهای اولتراسونیک برای کار در مخازن تحت فشار (بیش از ۲–۳ بار) طراحی نشدهاند. فشار بالا چگالی گاز را تغییر میدهد و از طرف دیگر مکانیزمهای آببندی دستگاه را تحت فشار مکانیکی قرار میدهد.
آسیبپذیری حیاتی چهارم — محدودیت دمایی ترانسدیوسر: کریستال پیزوالکتریک در هسته ترانسدیوسر اولتراسونیک دارای دمای کوری (Curie Temperature) است. دمای بیشتر از ۸۰–۱۰۰ درجه سانتیگراد در اکثر مدلهای استاندارد، خواص پیزوالکتریک آن را بهطور دائمی خراب میکند.
آسیبپذیری حیاتی پنجم — ناتوانی در اندازهگیری کف: سطح کف بازتابدهنده بسیار ضعیف است. موج صوتی بهجای بازتاب از سطح محکم مایع، در داخل ساختار متخلخل کف پراکنده میشود و بازگشتی قابل استفاده ایجاد نمیکند.
سطحسنج خازنی: اصول و شکستپذیری در عمل
سطحسنج خازنی بر اساس تغییر ظرفیت خازنی بین یک الکترود فلزی (پروب) و دیواره مخزن (الکترود دوم) کار میکند. وقتی سیال بین این دو الکترود قرار میگیرد، بهدلیل ثابت دیالکتریک بیشتر سیال نسبت به هوا، ظرفیت خازنی افزایش مییابد. تغییر ظرفیت خازنی با سطح سیال رابطه خطی دارد.
مزایای واقعی: این تکنولوژی برای سیالاتی با ثابت دیالکتریک بالا (مانند آب با Dk≈80) عملکرد عالی دارد. در کاربردهای ساده مانند مخازن آب کشاورزی یا سیستمهای تبرید، قابل اعتماد است.
اما در محیطهای صنعتی پیچیده، خازنی با مجموعهای از نقصهای ساختاری مواجه است:
مشکل اساسی اول — رسوبگذاری روی پروب: در سیالات حاوی مواد معلق، ذرات جامد، پارافین یا مواد آلی چسبنده، لایهای روی پروب تشکیل میشود. این لایه دارای ثابت دیالکتریک خاص خودش است و باعث میشود دستگاه حتی زمانی که مخزن خالی است، سطح مثبت نشان دهد — یک خطای ساختاری غیرقابل اجتناب در صنایع آلودهکننده.
مشکل اساسی دوم — وابستگی شدید به خواص ماده: هر تغییر در ترکیب شیمیایی سیال (تغییر غلظت، دما، ترکیب فازی)، ثابت دیالکتریک آن را تغییر میدهد و کالیبراسیون را باطل میکند. این مشکل در فرایندهایی که ترکیب محصول متغیر است، سطحسنج خازنی را بهطور عملی غیرقابل استفاده میکند.
مشکل اساسی سوم — محدودیت در سیالات با Dk پایین: هیدروکربنهای سبک مانند بنزین (Dk≈2.0)، تولوئن (Dk≈2.4) و LPG (Dk≈1.8) سیگنال خازنی بسیار ضعیفی ایجاد میکنند که بهراحتی در نویز اندازهگیری گم میشود. در صنایع پتروشیمی که اکثر محصولات Dk پایین دارند، این یک محدودیت بسیار جدی است.
مشکل اساسی چهارم — خطر ایمنی در انواع بدون پوشش: پروب فلزی بدون پوشش در تماس مستقیم با سیالات هادی، جریان الکتریکی مستقیمی از سیال عبور میدهد. در مایعات قابل احتراق، این میتواند خطر جرقه و اشتعال ایجاد کند.
ترانسمیتر فشار تفاضلی: کاربرد و قیود محیطی
ترانسمیتر سطح فشار تفاضلی (DP Level Transmitter) اختلاف فشار بین کف و بالای مخزن (یا مخزن تحت فشار) را اندازه میگیرد. با دانستن چگالی سیال، این اختلاف فشار مستقیماً به ارتفاع سطح مایع تبدیل میشود: ΔP = ρ × g × h
مزایای واقعی: ساده، قابل اطمینان، برای مخازن بسته و مخازن تحت فشار مناسب، فاقد قطعات متحرک.
اما محدودیتهای آن:
محدودیت اساسی اول — وابستگی به چگالی سیال: هرگونه تغییر در چگالی سیال (در اثر تغییر دما، ترکیب یا فاز) مستقیماً در اندازهگیری سطح خطا ایجاد میکند. یک تغییر ۵٪ در چگالی، خطای ۵٪ در اندازهگیری سطح به وجود میآورد.
محدودیت اساسی دوم — پیچیدگی در مخازن چندفازی: در مخازن حاوی سیالات دو یا چندفازی، چگالی متوسط بهطور مداوم تغییر میکند و کالیبراسیون ثابت منجر به خطای غیرقابل قبول میشود.
محدودیت اساسی سوم — مشکلات لولهکشی تکانهای: لولههای تکانهای (Impulse Lines) که فشار را از مخزن به ترانسمیتر منتقل میکنند، در سیالات ویسکوز، رسوبگذار یا سیالاتی که در دمای پایین جامد میشوند (مانند گوگرد مذاب) بهسرعت انسداد پیدا میکنند. نگهداری این لولهها به ویژه در مخازن بزرگ و مخازن روی پشتبام، هزینه تعمیرات قابل توجهی ایجاد میکند.
محدودیت اساسی چهارم — ناکارایی در مخازن بزرگ با Bridle: در مخازن بزرگ ذخیرهسازی (AST — Aboveground Storage Tank)، لولههای اتصال بین مخزن و ترانسمیتر (Bridle) در معرض آفتاب، باد و تغییرات دمای محیط هستند که منجر به خطاهای اندازهگیری قابل توجه میشوند.
جدول مقایسه جامع چهار فناوری اصلی
| معیار | اولتراسونیک | خازنی | فشار تفاضلی (DP) | رادار (FMCW/GWR) |
|---|---|---|---|---|
| اصل کارکرد | زمان پرواز موج صوتی | تغییر ظرفیت خازنی | اندازهگیری اختلاف فشار | زمان پرواز موج الکترومغناطیس |
| دقت اندازهگیری | ±۳–۱۰ میلیمتر | ±۵–۱۵ میلیمتر | ±۱–۵ میلیمتر (وابسته به چگالی) | ±۰.۵–۲ میلیمتر |
| برد اندازهگیری | تا ۱۵ متر | تا ۳۰ متر | نامحدود (وابسته به فشارسنج) | تا ۱۰۰ متر |
| تأثیر بخار و گاز | بسیار زیاد — اختلال شدید | متوسط | بدون تأثیر | ناچیز — تقریباً بدون تأثیر |
| تأثیر تغییر دما | زیاد — نیاز به جبرانسازی | متوسط | متوسط | بسیار کم |
| تأثیر رسوب روی دستگاه | متوسط | بسیار زیاد — خطای ساختاری | زیاد (انسداد لوله) | کم (GWR) / بدون تأثیر (FMCW) |
| کاربرد در مخازن تحت فشار | خیر | محدود | بله | بله — تا ۴۰۰ بار |
| سازگاری با کف (Foam) | خیر | متوسط | ضعیف | خوب تا بسیار خوب |
| وابستگی به Dielectric Constant | بدون تأثیر | بسیار زیاد | بدون تأثیر | کم (FMCW) / متوسط (GWR با Dk پایین) |
| تماس با سیال | خیر | بله | بله (دیافراگم) | خیر (FMCW) / بله (GWR) |
| نیاز به نگهداری | کم | زیاد (تمیزکاری پروب) | متوسط تا زیاد | بسیار کم |
| قابلیت SIL (IEC 61511) | SIL-1 | SIL-1 | SIL-2 | تا SIL-3 (مدلهای خاص) |
| پروتکل خروجی | ۴–۲۰mA | ۴–۲۰mA | ۴–۲۰mA / HART | ۴–۲۰mA / HART / Profibus / FF |
| بازه دمایی فرایند | −۴۰ تا +۸۰°C | −۴۰ تا +۲۰۰°C | −۵۰ تا +۴۰۰°C | −۴۰ تا +۴۵۰°C |
| هزینه اولیه تقریبی | پایین | پایین تا متوسط | متوسط | متوسط تا بالا |
| هزینه چرخه عمر (LCC) | متوسط | بالا (نگهداری) | بالا (نگهداری) | پایین (کمنیاز به نگهداری) |
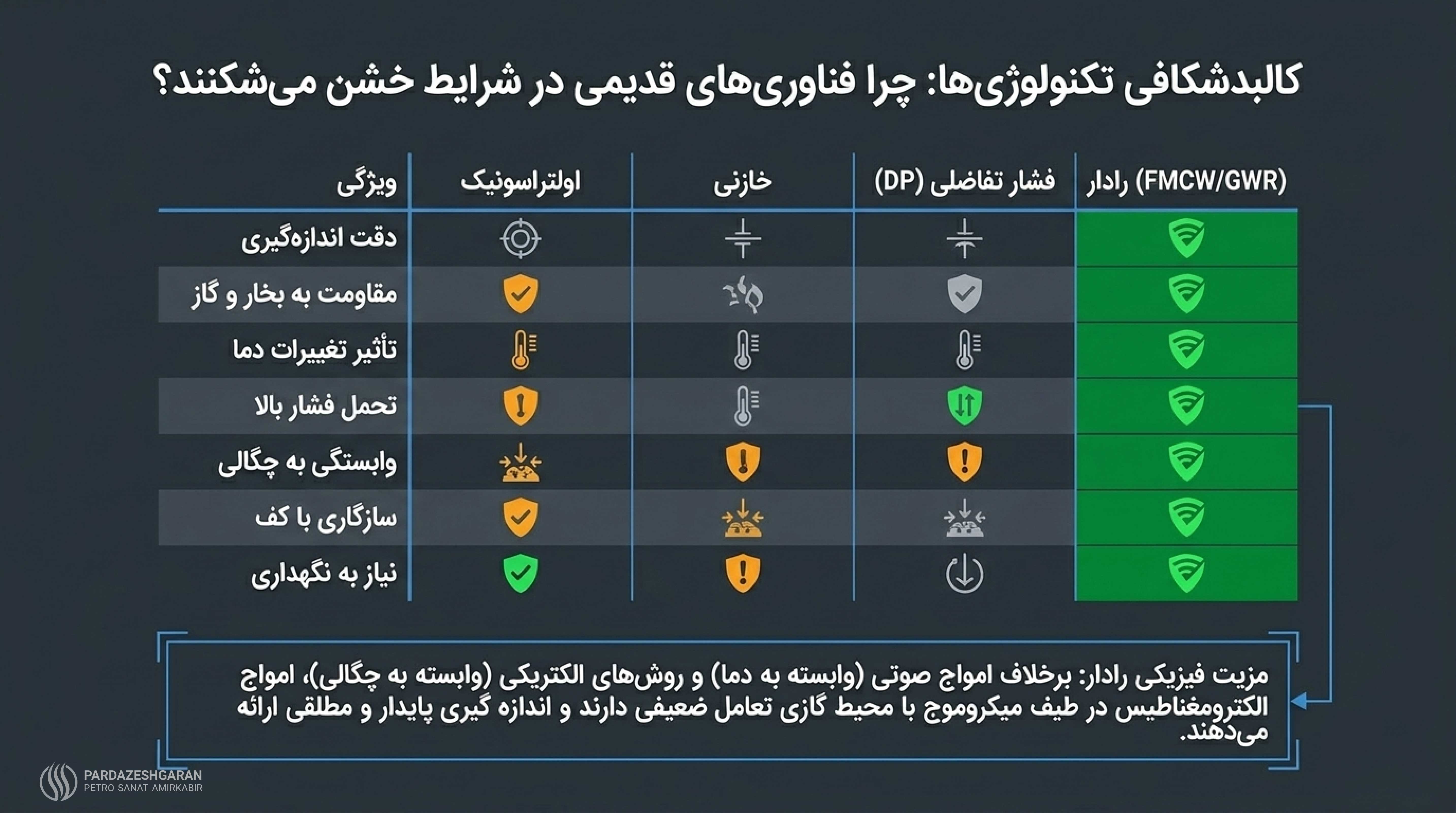
آنچه از این مقایسه آشکار میشود این است که فناوری رادار در تقریباً تمام معیارهای عملکردی مهم — دقت، برد، مقاومت در برابر شرایط خشن، و هزینه چرخه عمر — برتری چشمگیری دارد. این برتری نه اتفاقی، بلکه حاصل یک مزیت فیزیکی بنیادین است: امواج الکترومغناطیس در طیف میکروموج، بر خلاف امواج صوتی، با محیط گازی تعامل بسیار ضعیفی دارند و بر خلاف روشهای الکتریکی، به خواص سیال وابسته نیستند.
۳. تئوری امواج الکترومغناطیس: علم پشت رادار در ابزار دقیق
سطحسنج راداری یک دستگاه رادار فشردهشده (Radar-on-a-chip) است که اصول فیزیکی آن ریشه در معادلات ماکسول (۱۸۶۵) و فناوری رادار نظامی جنگ جهانی دوم دارد، اما با پیشرفت تکنولوژی نیمههادی و پردازش سیگنال دیجیتال، به ابزاری کوچک، مقرونبهصرفه و فوقدقیق تبدیل شده است.
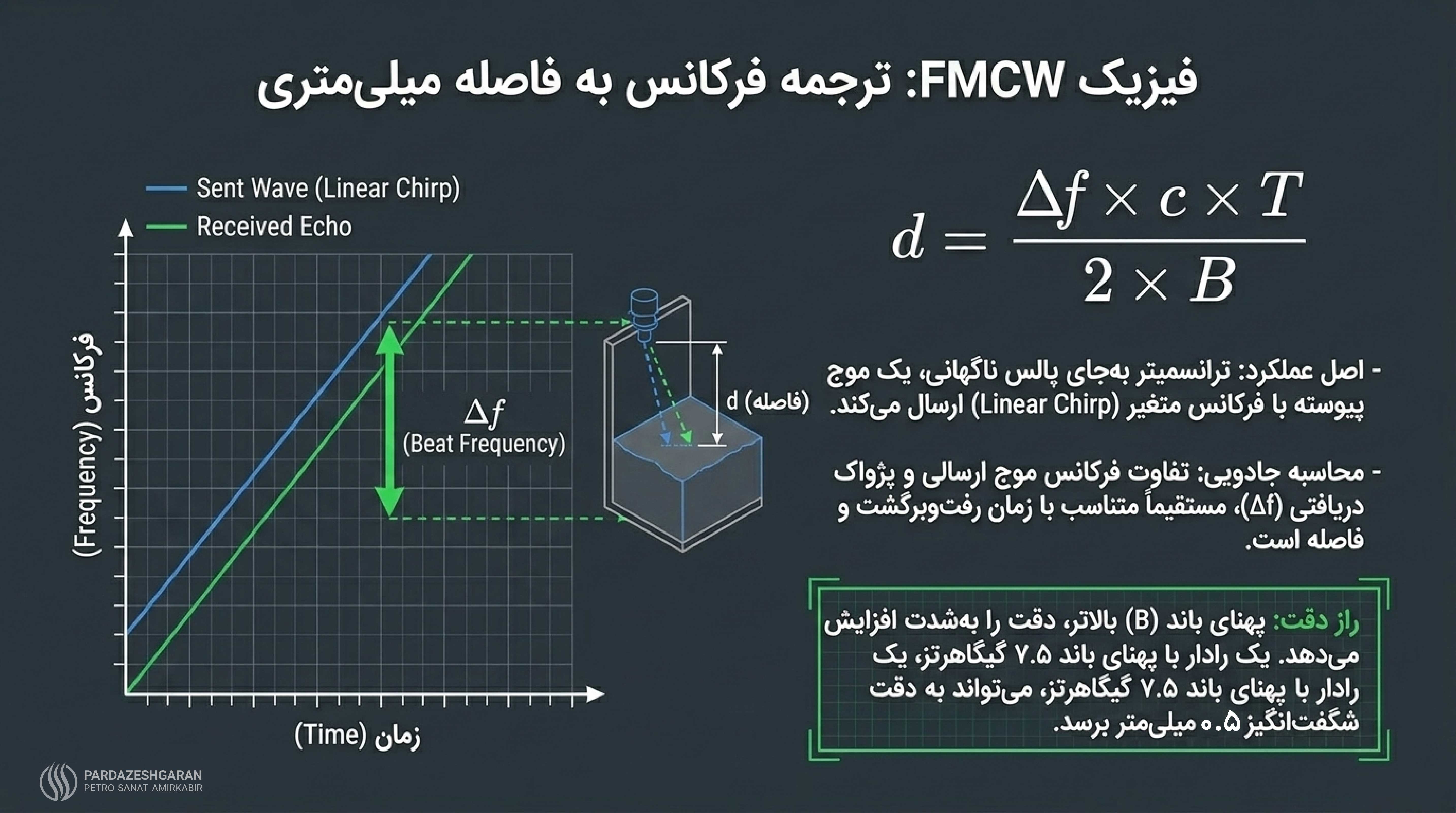
اصل FMCW و محاسبه زمان پرواز (ToF)
مدرنترین سطحسنجهای راداری از تکنیک FMCW (Frequency Modulated Continuous Wave) استفاده میکنند. درک این اصل برای هر مهندس ابزار دقیق که با این دستگاهها کار میکند، ضروری است.
در تکنیک FMCW، فرستنده بهجای ارسال یک پالس ناگهانی کوتاه، یک موج پیوسته با فرکانس متغیر به شکل یک رمپ خطی (Linear Chirp) ارسال میکند. این رمپ در یک بازه زمانی مشخص (Period) فرکانس را از f_min تا f_max تغییر میدهد.
مکانیزم محاسبه فاصله:
وقتی این موج به سطح سیال برخورد میکند، بخشی از انرژی آن به سمت آنتن بازمیگردد. در لحظه دریافت پژواک، فرکانس ارسالشده اکنون با فرکانس زمان ارسال پژواک تفاوت (Δf) دارد. این تفاوت فرکانسی — که به آن Beat Frequency میگویند — دقیقاً متناسب با زمان رفتوبرگشت موج است:
Δf = (2 × d × B) / (c × T)
که در آن: d = فاصله تا سطح، B = پهنای باند فرکانسی، c = سرعت نور (≈۳×۱۰⁸ m/s)، T = دوره تکرار.
با مرتب کردن: d = (Δf × c × T) / (2 × B)
این رابطه یک نتیجه بسیار مهم دارد: دقت اندازهگیری مستقیماً با پهنای باند (B) رابطه دارد. هر چه B بیشتر باشد، همان Δf کوچکتر با فاصله بیشتری متناظر است و در نتیجه دقت بیشتر است. یک ترانسمیتر با پهنای باند ۱ گیگاهرتز دقت حدود ۱۵ سانتیمتر و یک ترانسمیتر با پهنای باند ۷.۵ گیگاهرتز دقت نظری حدود ۲ سانتیمتر دارد.
سیگنال Beat Frequency با یک تبدیل فوریه سریع (FFT) تحلیل میشود. هر پیک در طیف FFT متناظر با یک سطح بازتابدهنده در فاصلهای مشخص است — همین ویژگی است که امکان تشخیص و فیلتر کردن اکوهای کاذب (از موانع داخلی) در کنار اکوی اصلی سطح مایع را میدهد.
تحلیل طیف FFT: از داده خام به عدد سطح
پس از محاسبه Beat Frequency، کار اصلی پردازش سیگنال آغاز میشود. سیگنال Beat یک موج پیچیده است که میتواند شامل اکوهای متعدد از نقاط مختلف مخزن — سطح مایع، موانع داخلی، دیوار مخزن — باشد. الگوریتم تبدیل فوریه سریع (Fast Fourier Transform) این سیگنال پیچیده را به طیف فرکانسی تجزیه میکند.
در این طیف، هر پیک فرکانسی یک هدف مجزا در فاصلهای خاص است. الگوریتم باید از میان این پیکهای متعدد، پیک متناظر با «سطح واقعی مایع» را شناسایی کند — کار سادهای نیست، زیرا در یک مخزن صنعتی پیچیده، دهها پیک ممکن است وجود داشته باشد.
الگوریتم Target Tracking (ردیابی هدف):
هر ترانسمیتر راداری مدرن از یک الگوریتم ردیابی هدف استفاده میکند که بر اساس تاریخچه اندازهگیریهای قبلی، هدف معتبر (سطح مایع) را از بین پیکهای موجود انتخاب میکند. این الگوریتم معمولاً با منطق زیر کار میکند:
- Window Tracking: در هر چرخه اندازهگیری، الگوریتم در یک پنجره محدود حول آخرین سطح اندازهگیریشده جستجو میکند. این کار سرعت ردیابی را محدود میکند اما از پرشهای ناگهانی به اکوهای کاذب جلوگیری میکند.
- Amplitude Threshold: پیکهایی که شدت آنها از یک آستانه حداقلی کمتر باشد، نادیده گرفته میشوند. این آستانه معمولاً توسط پارامتر «Minimum Echo Amplitude» تنظیم میشود.
- Rate of Change Limit: سرعت تغییر سطح مایع واقعی از نظر فیزیکی محدود است. اگر در یک چرخه، دستگاه جهشی بیشتر از حد معقول را شناسایی کند (مثلاً ۵۰ سانتیمتر در یک ثانیه در یک مخزن بزرگ)، این جهش بهعنوان اکوی کاذب رد میشود.
پارامتر Damping Time Constant:
یکی از مهمترین پارامترهای کالیبراسیون که اغلب نادیده گرفته میشود، ثابت زمانی میرایی (Damping Time Constant) است. این پارامتر نرخ پاسخ خروجی به تغییرات واقعی سطح را کنترل میکند.
اگر Damping را روی ۱ ثانیه تنظیم کنید، خروجی دستگاه در مدت ۱ ثانیه به ۶۳٪ مقدار واقعی میرسد. Damping زیاد (مثلاً ۳۰ ثانیه) نوسانات کوتاهمدت ناشی از تلاطم را حذف میکند اما واکنش دستگاه به تغییرات واقعی را کند میکند. Damping کم (مثلاً ۱ ثانیه) واکنش سریع دارد اما در مخازن متلاطم، نویز بیشتری در خروجی ایجاد میشود.
قانون کلی: برای مخازن با سطح ثابت (ذخیرهسازی)، Damping زیاد (۲۰–۶۰ ثانیه). برای مخازن کنترل فرایند (رآکتور، مخازن بافر)، Damping متوسط (۵–۱۵ ثانیه). برای اندازهگیری جریانها یا مخازن سریع، Damping کم (۱–۳ ثانیه).
نسبت سیگنال به نویز (SNR) و حداقل سطح قابل اندازهگیری:
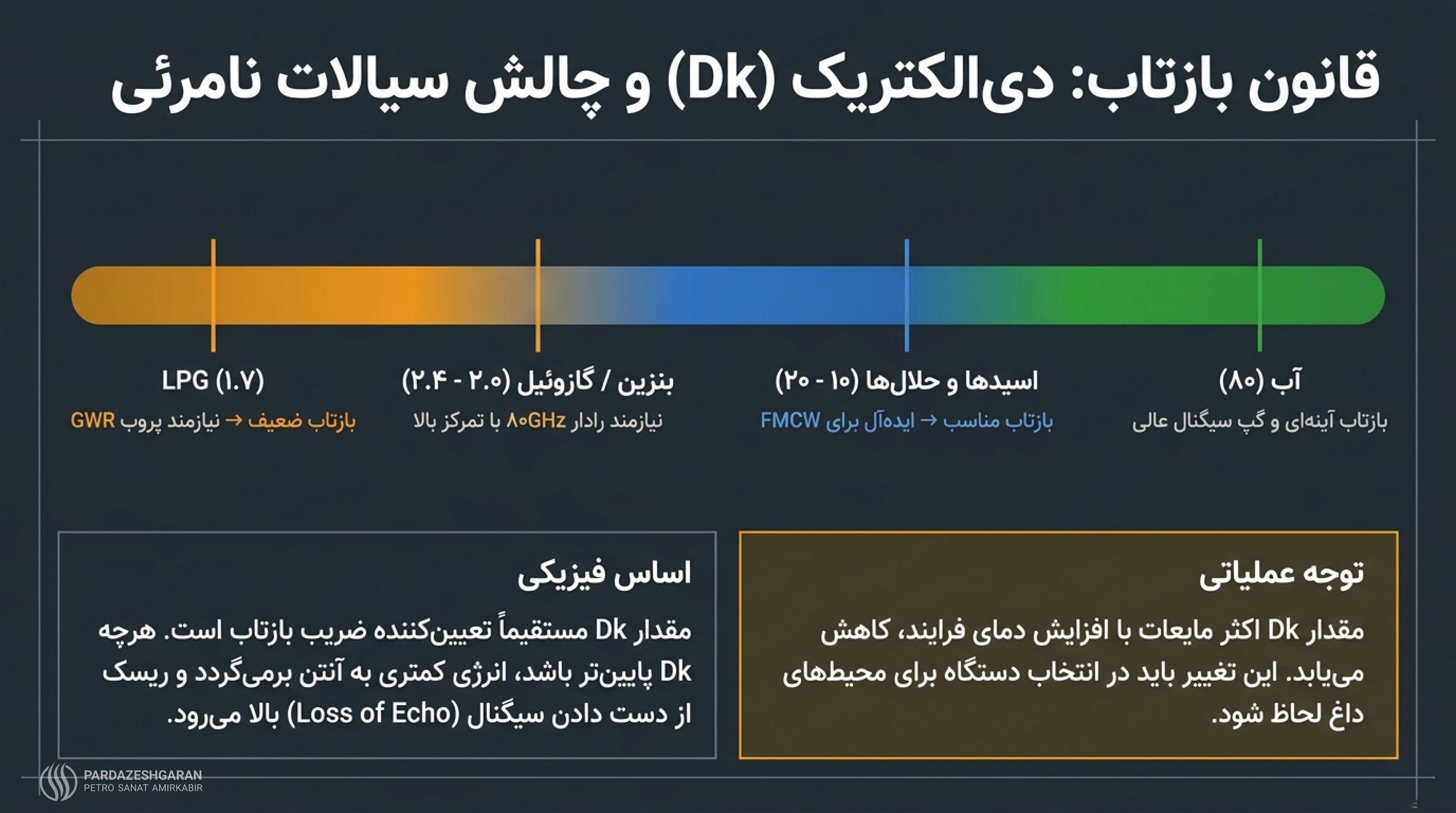
SNR (Signal-to-Noise Ratio) در سطحسنجهای راداری تعیین میکند که آیا پژواک برگشتی از سطح مایع به اندازه کافی قویتر از نویز پسزمینه هست یا نه. اگر SNR پایینتر از یک آستانه حداقلی (معمولاً ۱۰–۱۵ دسیبل) باشد، دستگاه «Loss of Echo» (از دست دادن پژواک) گزارش میدهد.
عوامل اصلی تأثیرگذار بر SNR:
- ثابت دیالکتریک سیال (Dk پایین = بازتاب کمتر = SNR کمتر)
- فاصله تا سطح (فاصله بیشتر = تضعیف بیشتر = SNR کمتر)
- زاویه سطح مایع نسبت به آنتن (انحراف از حالت عمود = SNR کمتر)
- کف روی سطح مایع (کف = پراکندگی = SNR کمتر)
- رسوب روی آنتن (کاهش مستقیم SNR)
مقایسه تکنیک FMCW با روش پالسی (Pulsed Radar)
برخی ترانسمیترهای قدیمی از روش پالسی (Time Domain Reflectometry یا TDR) استفاده میکنند. درک تفاوت این دو رویکرد مهم است:
| معیار | FMCW (موج پیوسته مدولهشده) | Pulsed Radar (پالس زمانی) |
|---|---|---|
| اصل اندازهگیری | تفاوت فرکانس (Beat Frequency) | زمان پرواز مستقیم (ToF) |
| توان ارسالی | پیوسته و کم (میلیوات) | پالسهای کوتاه با توان پیک بالا |
| دقت | بسیار بالا (زیر ۱ میلیمتر) | متوسط (چند میلیمتر) |
| Dead Zone (محدوده کور) | کوچک (۰.۱–۰.۳ متر برای ۸۰ گیگاهرتز) | بزرگتر (۰.۵–۱ متر) |
| مصرف انرژی | پایین | بالاتر |
| پیچیدگی پردازش سیگنال | بالا (FFT + الگوریتمهای پیچیده) | پایینتر |
| کاربرد در صنعت | غالب در ترانسمیترهای جدید | عمدتاً در GWR و برخی مدلهای قدیمی |
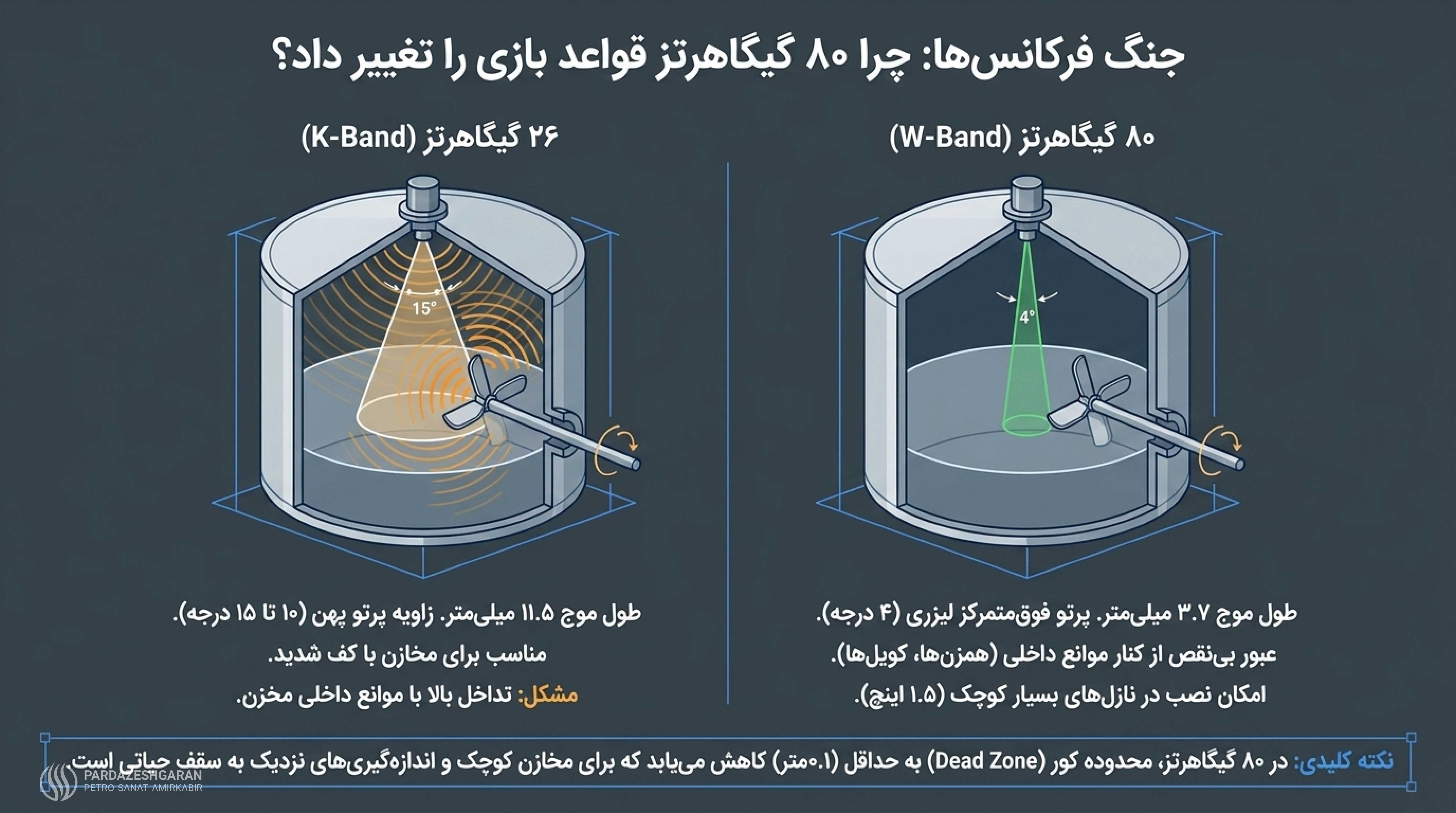
باندهای فرکانسی ۲۶ و ۸۰ گیگاهرتز
سطحسنجهای راداری صنعتی عمدتاً در دو باند فرکانسی اصلی کار میکنند، و انتخاب بین آنها تأثیر مستقیمی بر عملکرد دارد:
باند ۲۶ گیگاهرتز (K-Band): نسل قدیمیتر. با طول موج حدود ۱۱.۵ میلیمتر. این فرکانس برای مخازن بزرگ و محیطهایی با کف یا آلودگی زیاد مناسبتر است زیرا طول موج بلندتر، نفوذپذیری بهتری از کف دارد. با این حال، بهدلیل طول موج بلندتر، برای رسیدن به یک پرتو باریک (Beam Angle) نیاز به آنتن بزرگتر وجود دارد.
باند ۸۰ گیگاهرتز (W-Band): نسل جدید با فناوری SiGe BiCMOS. با طول موج ۳.۷ میلیمتر. این فرکانس مزایای اساسی دارد: پهنای باند بیشتر (۷.۵ گیگاهرتز در برخی مدلها) که دقت تئوری را به زیر ۲ میلیمتر میرساند. با همان اندازه آنتن، پرتوی بسیار باریکتری (تا ۴ درجه) در مقابل ۱۰–۱۵ درجه در ۲۶ گیگاهرتز ایجاد میکند. این زاویه باریکتر یعنی کمترین تداخل با موانع داخلی مخزن و توانایی نصب در نازلهای کوچکتر (از ۱.۵ اینچ به بالا). همچنین با پهنای باند بیشتر، قدرت تفکیک بهتری بین دو سطح بازتابدهنده نزدیک به هم (مثلاً سطح مایع و رابط دو فاز) دارد.
اثر انتشار بر دقت: یک سوءتفاهم رایج این است که فکر میکنند رادار در ۸۰ گیگاهرتز بیشتر تحت تأثیر بخار آب است. در واقع، برای فشارهای عملیاتی صنعتی معمول، تفاوت تضعیف بین ۲۶ و ۸۰ گیگاهرتز ناچیز است و هر دو فناوری در کاربردهای واقعی عملکردی کاملاً قابل قبول دارند.
۴. کالبدشکافی ترانسمیتر سطح راداری: از آنتن تا خروجی ۴–۲۰mA
یک ترانسمیتر سطح راداری صنعتی از چهار زیرسیستم اصلی تشکیل شده است که درک هریک برای انتخاب صحیح، نصب، کالیبراسیون و عیبیابی الزامی است.
انواع آنتنها و مزایای هر کدام
آنتن در یک سطحسنج راداری غیرتماسی، همانقدر اهمیت دارد که لنز در دوربین. آنتن وظیفه تبدیل انرژی الکترومغناطیسی به یک پرتو متمرکز در فضای داخل مخزن و سپس دریافت پژواک بازگشتی را دارد. انواع اصلی عبارتند از:
آنتن بوق (Horn Antenna): رایجترین و پرکاربردترین نوع در صنایع فرایندی. یک محفظه مخروطی یا هرمی که موج را از فضای محدود به داخل مخزن هدایت میکند. مزایا: پرتو متمرکز، بازده بالا، مقاوم در برابر بخار و ترشح مایع. قطر دهانه بوق زاویه پرتو را تعیین میکند — بوق بزرگتر = زاویه باریکتر = تمرکز بهتر. معمولاً برای اکثر مخازن مایع مناسب است.
آنتن میلهای (Rod Antenna): یک میله فلزی یا PTFE که از بالای دستگاه به داخل نازل مخزن تا چند سانتیمتر داخل فضا آویزان میشود. پرتو را در جهت پایین میفرستد اما با بازده پایینتر از آنتن بوق. مزیت اصلی: مناسب برای مخازن با نازلهای کوچک (۲ اینچ) و سیالاتی که ممکن است روی آنتن رسوب ایجاد کنند، زیرا شستشو با آب یا بخار آسانتر است.
آنتن پلانار (Planar/Flush-Mount Antenna): آنتن صفحهای که کاملاً با فلانج دستگاه همسطح است و هیچ برجستگی داخل مخزن ندارد. مناسب برای سیالات بسیار خورنده، ویسکوز یا جامدات دانهای که هر برجستگی را در کمترین زمان با رسوب پر میکنند. از آنجا که این آنتنها اغلب از PTFE یا Al₂O₃ (سرامیک آلومینا) ساخته میشوند، در برابر تمام اسیدها و بازها مقاوماند.
آنتن آرایهای (Phased Array Antenna): نسل جدیدی از آنتنها که در برخی ترانسمیترهای پیشرفته ۸۰ گیگاهرتز استفاده میشوند. این آنتن میتواند جهت پرتو را بهصورت الکترونیکی تغییر دهد (Electronic Beam Steering)، که برای یافتن بهترین نقطه اندازهگیری در مخازن با سطح متلاطم یا یافتن کمینه اکوهای کاذب استفاده میشود.
بردهای پردازش سیگنال و الگوریتمهای DSP
قلب تپنده یک ترانسمیتر راداری، برد پردازش سیگنال (Signal Processing Board) است. این برد چندین وظیفه حیاتی را همزمان انجام میدهد:
تولید موج FMCW: یک VCO (Voltage-Controlled Oscillator) با دقت بالا، تحت کنترل یک PLL (Phase-Locked Loop)، رمپ فرکانسی خطی را تولید میکند. خطی بودن این رمپ مستقیماً بر دقت اندازهگیری تأثیر میگذارد.
دریافت و تقویت سیگنال بازگشتی: پژواک بازگشتی بسیار ضعیف است (معمولاً ۱۰۰ تا ۱۰۰۰ بار ضعیفتر از سیگنال ارسالی). یک LNA (Low-Noise Amplifier) در ورودی گیرنده، این سیگنال را با کمترین افزودن نویز تقویت میکند.
تولید سیگنال Beat: میکسر (Mixer) سیگنال دریافتشده را با نسخهای از سیگنال ارسالی ترکیب میکند تا سیگنال Beat Frequency با فرکانسهای بسیار پایینتر (چند صد هرتز تا چند کیلوهرتز) تولید شود.
پردازش دیجیتال: یک ADC (Analog-to-Digital Converter) با نمونهبرداری سریع، سیگنال را دیجیتالی میکند. سپس الگوریتم FFT روی آن اجرا میشود. خروجی FFT یک طیف است که هر پیک در آن یک هدف بازتابدهنده در فاصلهای مشخص نشان میدهد.
رزولوشن (Resolution): رزولوشن فاصلهای ترانسمیتر رادار بیانگر کمترین فاصلهای است که بین دو هدف قابل تفکیک است. این پارامتر در اصل تعیین میکند که آیا دستگاه میتواند بین سطح مایع اصلی و یک بازتاب کاذب از مانع داخلی نزدیک تمایز قائل شود یا نه. رزولوشن = c / (2 × B)، که برای پهنای باند ۷.۵ گیگاهرتز به ۲ سانتیمتر میرسد.
پروتکلهای ارتباطی: HART، Profibus و Foundation Fieldbus
خروجی ۴ تا ۲۰ میلیآمپر با اُورلِی HART: استاندارد صنعتی برای ارتباط با DCS/PLC. جریان ۴mA نشانگر صفر مقیاس و ۲۰mA نشانگر ۱۰۰٪ مقیاس است. پروتکل هارت (HART Protocol) یک سیگنال دیجیتال با فرکانس FSK را روی همان زوج سیم ۴–۲۰mA سوار میکند. این سیگنال دیجیتال اطلاعات تشخیصی، پارامترهای کالیبراسیون، دادههای فرایندی اضافه و وضعیت دستگاه را انتقال میدهد. با یک HART Communicator (مانند FC-475) یا از طریق نرمافزار AMS، مهندس ابزار دقیق میتواند از کنترلخانه یا مستقیم از سایت، دستگاه را برنامهریزی کند.
Profibus PA: برای سیستمهای DCS مدرن با شبکه Profibus. ارتباط دیجیتال کامل با قابلیتهای تشخیصی پیشرفته و آدرسدهی چندگانه روی یک باس. معمولاً برای تأسیسات جدید پتروشیمی با معماری FieldBus یکپارچه استفاده میشود.
Foundation Fieldbus H1: استاندارد مشابه Profibus PA با قابلیت کنترل توزیعشده (Control in the Field). در این ساختار، عملیات کنترل ساده (مثلاً کنترل PID) میتواند مستقیماً در ترانسمیتر انجام شود، بدون نیاز به DCS.
Modbus RTU/TCP: در تأسیسات کوچکتر با PLCهای ساده، برخی ترانسمیترها از این پروتکل پشتیبانی میکنند. هزینه پایینتر راهاندازی، اما با قابلیتهای تشخیصی محدودتر.
۵. رادار تماسی (GWR) در برابر رادار بدون تماس (FMCW)
در دنیای سطحسنجهای راداری، دو معماری اصلی وجود دارد که هرکدام برای کاربردهای خاصی بهینهسازی شدهاند. درک تفاوتهای عمیق این دو، کلید انتخاب صحیح برای هر کاربرد است.
رادار موج هدایتشونده: مکانیزم و انواع پروب
در رادار موج هدایتشونده (GWR — Guided Wave Radar)، موج الکترومغناطیسی بهجای انتشار آزاد در فضا، از طریق یک پروب (probe) فیزیکی که وارد مخزن شده هدایت میشود. این پروب اغلب از جنس فولاد ضدزنگ، هاستلوی یا PTFE است و بهصورت عمودی از بالا تا نزدیک کف مخزن امتداد دارد.
مکانیزم کار این است که وقتی موج الکترومغناطیسی هدایتشده به سطح مایع میرسد، تغییر ناگهانی ثابت دیالکتریک (از هوا/بخار به مایع) باعث بازتاب قسمت مهمی از انرژی به سمت بالا میشود. مشابه با رادار غیرتماسی، زمان رفتوبرگشت این بازتاب به فاصله تبدیل میشود.
انواع پروب GWR:
پروب تکسیمه (Single Rod/Wire): سادهترین نوع. برای مایعات با Dk بیشتر از ۱.۵ مناسب است. جریان الکترومغناطیسی بین پروب و دیواره مخزن (که بهعنوان الکترود دوم عمل میکند) برقرار میشود. برای مخازن فلزی که جریان برمیگردانند مناسب است.
پروب دوسیمه (Twin Rod/Flexible Cable): دو سیم (یا کابل انعطافپذیر) که در کنار هم قرار میگیرند. این پروب برای مخازن غیرفلزی یا پلاستیکی مناسب است، زیرا جریان بین دو سیم برقرار میشود و نیازی به دیواره فلزی مخزن نیست.
پروب هممحور (Coaxial): یک سیم داخلی درون یک لوله فلزی بیرونی. این نوع در برابر اثرات اغتشاش سطح و وجود موانع داخلی بهترین عملکرد را دارد. برای اندازهگیری رابط دو فاز (Interface Measurement) بین آب و نفت نیز استفاده میشود.
مزایای کلیدی GWR: عملکرد قابل اعتماد در سیالات با Dk پایین (تا ۱.۵)، عدم تأثیر موانع داخلی مخزن روی اندازهگیری (زیرا موج داخل پروب هدایت میشود)، توانایی اندازهگیری همزمان سطح دو فاز (Interface Detection)، و عملکرد در دمای بالا تا ۴۵۰ درجه.
محدودیتهای GWR: تماس مستقیم پروب با سیال (خطر خوردگی، رسوب)، محدودیت طول پروب (معمولاً تا ۶ متر برای پروب صلب، تا ۳۰ متر برای کابل انعطافپذیر)، ناسازگاری با مخازن دارای همزن (احتمال آسیب مکانیکی به پروب)، و ناسازگاری با جامدات دانهای (گرفتگی).
رادار بدون تماس آزادفضا: مکانیزم و مزایا
در رادار FMCW غیرتماسی، موج میکروموج آزادانه از آنتن به سمت سطح مایع منتشر شده و پژواک آن به آنتن برمیگردد. هیچ تماس فیزیکی بین دستگاه و سیال وجود ندارد.
مزایای کلیدی FMCW غیرتماسی:
عدم تماس فیزیکی با سیال: این ویژگی بنیادین یعنی سطحسنج برای تمام سیالات خورنده، حلالها، مواد سمی، اسیدها و بازهای غلیظ قابل استفاده است. تنها سطح آنتن (که معمولاً از PTFE یا سرامیک ساخته شده) در تماس با فضای مخزن است.
مناسب برای مخازن بزرگ: برای مخازن با ارتفاع ۲۰ تا ۱۰۰ متر، GWR عملاً غیرممکن است (هزینه و وزن پروب). رادار غیرتماسی این مشکل را ندارد و برای Tank Farmهای نفتی با مخازن ۱۰۰,۰۰۰ بشکهای، ابزار اصلی است.
مناسب برای همزندار (Agitator): چون هیچ پروبی داخل مخزن نیست، خطر آسیب مکانیکی وجود ندارد. با انتخاب موقعیت مناسب آنتن نسبت به مسیر همزن، اندازهگیری قابل قبول امکانپذیر است.
محدودیتهای FMCW غیرتماسی: برای سیالات با Dk کمتر از ۱.۶–۱.۸ (مانند برخی هیدروکربنهای سبک یا حلالهای غیرقطبی)، انرژی بازتابی از سطح بسیار کم است و عملکرد تضمینشده نیست. در این موارد، GWR انتخاب بهتری است. همچنین موانع داخلی مخزن میتوانند اکوهای کاذب ایجاد کنند که نیاز به برنامهریزی دارد.

راهنمای انتخاب: GWR یا FMCW؟
| پارامتر کاربرد | GWR (موج هدایتشونده) | FMCW (غیرتماسی) |
|---|---|---|
| ثابت دیالکتریک سیال | Dk ≥ ۱.۵ (ایدهآل) | Dk ≥ ۱.۸ (ایدهآل) |
| ارتفاع مخزن | تا ۳۰ متر (کابل) / ۶ متر (صلب) | تا ۱۰۰ متر |
| همزن داخلی (Agitator) | خیر — خطر آسیب مکانیکی | بله — با موقعیتیابی صحیح |
| اندازهگیری دو فاز (Interface) | بله — با پروب هممحور | محدود |
| جامدات دانهای | خیر — گرفتگی | بله — ایدهآل |
| سیالات خورنده | بله (با پروب PTFE/هاستلوی) | بله (بدون تماس با سیال) |
| کف بر سطح سیال | خوب — پروب از کف عبور میکند | متوسط |
| دمای فرایند | تا ۴۵۰°C | تا ۲۶۰°C (آنتن معمولی) / ۴۵۰°C (آنتن سرامیکی) |
| فشار فرایند | تا ۴۰۰ بار | تا ۴۰۰ بار |
| مخازن بزرگ با موانع داخلی زیاد | ایدهآل — موج داخل پروب است | نیاز به برنامهریزی Mapping |
| هزینه نصب و نگهداری | متوسط | کم |
۶. اثر ثابت دیالکتریک، بخار و شرایط محیطی خشن
ثابت دیالکتریک: اساسیترین پارامتر انتخاب
ثابت دیالکتریک (Dielectric Constant یا Permittivity، نماد: εr یا Dk) مقداری بیبُعد است که توانایی یک ماده در ذخیره انرژی الکتریکی در میدان الکتریکی را بیان میکند. برای خلأ Dk=1 است و هر ماده دیگری مقداری بالاتر دارد.
در سطحسنجهای راداری، Dk نقش کلیدی بازی میکند زیرا ضریب بازتاب (Reflection Coefficient) در مرز بین دو محیط — مثلاً بخار (Dk≈۱) و مایع — مستقیماً به تفاوت Dk بین آنها بستگی دارد. فرمول تقریبی ضریب بازتاب در زاویه عمودی:
Γ = (√Dk - 1) / (√Dk + 1)
این رابطه نشان میدهد که برای سیالاتی با Dk پایین (مانند بنزین با Dk≈۲ که Γ≈۱۷٪ است)، انرژی بازتابی بسیار کم است و دستگاه باید حساسیت گیرنده بیشتری داشته باشد. برای آب (Dk≈۸۰ که Γ≈۸۵٪ است)، تقریباً تمام انرژی بازتاب میشود.
مقادیر Dk برای مواد رایج صنعتی:
| ماده | Dk (تقریبی) | دستهبندی | توصیه فناوری |
|---|---|---|---|
| آب | ۸۰ | Dk بسیار بالا | FMCW یا GWR — هر دو عالی |
| اسید سولفوریک ۹۸٪ | ۱۰۱ | Dk بسیار بالا | FMCW با آنتن PTFE/سرامیک |
| اتانول | ۲۴ | Dk بالا | FMCW یا GWR |
| استون | ۲۰ | Dk بالا | FMCW یا GWR |
| گازوئیل | ۲.۱–۲.۴ | Dk پایین | GWR (پروب تکسیمه) یا FMCW ۸۰GHz |
| بنزین | ۱.۹–۲.۱ | Dk پایین | GWR یا FMCW ۸۰GHz با حساسیت بالا |
| نفت خام | ۲.۰–۲.۵ | Dk پایین | GWR (توصیهشده) |
| LPG (پروپان مایع) | ۱.۷–۱.۹ | Dk بسیار پایین | GWR — الزامی |
| تولوئن | ۲.۴ | Dk پایین | GWR یا FMCW با آنتن بزرگ |
| گوگرد مذاب (۱۵۰°C) | ۳.۳–۳.۵ | Dk متوسط | FMCW یا GWR (با رعایت دمای پروب) |
| اتیلن اکساید | ۱۲ | Dk بالا | FMCW (ترجیحاً بهدلیل سمی بودن) |
| آمونیاک مایع | ۱۶–۲۵ | Dk بالا | FMCW یا GWR |
نکته مهم: Dk با دما تغییر میکند. برای اکثر مایعات، Dk با افزایش دما کاهش مییابد. برای کاربردهایی که دمای فرایند بهشدت متغیر است، این تغییر باید در کالیبراسیون لحاظ شود.
عملکرد در دما و فشار بالا، مخازن اسیدی و همزندار
مخازن با دما و فشار بالا:
در راکتورهای شیمیایی، مخازن بخار و سیستمهای استخراج تحت فشار، ترکیب دما و فشار بالا، سختترین شرایط برای هر دستگاه اندازهگیری است. سطحسنج راداری برای این کاربردها باید دارای ویژگیهای زیر باشد:
اتصال فشاری (Process Connection) با رتبهبندی مناسب: فلانجهای ۱۵۰#، ۳۰۰#، ۶۰۰# تا ۲۵۰۰# با مواد ASME B16.5 (فولاد ضدزنگ ۳۱۶L یا هاستلوی C). برای فشارهای بسیار بالا (بیش از ۱۰۰ بار)، اتصالات خاص Swagelok یا NPT با گسکتهای گرافیتی استفاده میشود.
پنجره RF (RF Window): بخش شفاف برای عبور موج الکترومغناطیسی از دستگاه به محیط مخزن. معمولاً از PTFE یا سرامیک آلومینا (Al₂O₃) ساخته میشود. این قطعه باید از نظر مکانیکی و شیمیایی با شرایط فرایند سازگار باشد — سرامیک آلومینا تا ۴۵۰ درجه و PTFE تا ۲۶۰ درجه عملکرد قابل قبول دارد.
الکترونیک در فاصله از فلانج: در کاربردهای با دمای بسیار بالا، الکترونیک دستگاه با استفاده از یک فاصلهدهنده (Extension Neck) از منبع گرما دور نگه داشته میشود تا دمای محیط الکترونیک در بازه −۴۰ تا +۷۵ درجه باقی بماند.
مخازن اسیدی و خورنده:
برای مخازن حاوی اسید هیدروکلریک (HCl)، اسید سولفوریک، اسید نیتریک یا سود غلیظ، انتخاب مواد در تماس با فرایند حیاتی است:
- آنتن PTFE: مقاوم در برابر تمام اسیدها و بازها تا ۲۶۰°C
- سرامیک Al₂O₃: مقاوم در برابر اکثر محیطهای خورنده تا ۴۵۰°C
- هاستلوی C-276: برای شرایطی که تماس کمی با سیال اجتنابناپذیر است
- PVDF: برای محیطهای اسیدی خفیفتر
مخازن همزندار (Agitated Vessels):
مخازن واکنشی و رآکتورهای شیمیایی اغلب مجهز به همزن مکانیکی (Impeller Agitator) هستند. این همزن چند چالش برای سطحسنج ایجاد میکند: تلاطم شدید سطح مایع، ایجاد بازتابهای متحرک از پرههای همزن که ممکن است بر سیگنال اثر بگذارند، و خطر آسیب مکانیکی در صورت نصب پروب GWR در مسیر همزن.
برای مخازن همزندار، توصیههای اصلی:
اول — استفاده از رادار FMCW غیرتماسی (نه GWR) تا از خطر آسیب مکانیکی پروب جلوگیری شود.
دوم — نصب دستگاه در موقعیتی که آنتن خارج از مسیر چرخش همزن باشد.
سوم — استفاده از یک لوله آرامش (Stilling Well یا Bypass Pipe) که یک محیط بدون اغتشاش برای اندازهگیری ایجاد کند. در این حالت، دستگاه سطح داخل لوله آرامش را میخواند که نماینده دقیق سطح واقعی مخزن است.
اثر کف و بخار بر دقت اندازهگیری
کف (Foam):
کف یک محیط دوفازی است: مخلوطی از گاز (هوا یا بخار) و مایع در سلولهای کوچک. ثابت دیالکتریک مؤثر کف بین Dk گاز (≈۱) و مایع (مثلاً ۸۰ برای آب) قرار میگیرد و به تراکم کف بستگی دارد. این یعنی کف یک منبع بازتاب ضعیف است.
رادار FMCW در ۸۰ گیگاهرتز با حساسیت بالا، معمولاً میتواند سطح مایع واقعی زیر کف را اندازه بگیرد، زیرا بخشی از موج از کف عبور کرده و از سطح مایع بازمیگردد. در مقابل، GWR با پروب هممحور معمولاً عملکرد بهتری در کف دارد چون موج در امتداد پروب حرکت میکند و بازتاب از هر دو مرز (بالای کف و سطح مایع زیر کف) را دریافت میکند.
بخار (Vapor):
بخار آب، بخارات هیدروکربنی و گازهای سنگین ممکن است در فضای بالای سطح مایع متراکم شوند. در فرکانسهای میکروموج که رادارهای صنعتی استفاده میکنند، تضعیف ناشی از بخار تحت فشارهای صنعتی معمول (کمتر از ۵۰ بار) معمولاً قابل چشمپوشی است — برخلاف امواج اولتراسونیک که بهشدت تضعیف میشوند.
تنها در فشارهای بسیار بالا (بیش از ۱۰۰ بار) که تراکم گاز بالاست، تضعیف معنیداری از بخارات رخ میدهد. در این موارد، سازندگان خوب ترانسمیترهای راداری توان ارسال و حساسیت گیرنده را برای فشارهای بالا بهینه میکنند.
۷. راهنمای جامع نصب مکانیکی و کالیبراسیون نرمافزاری
نصب مکانیکی: موقعیتیابی، نازل و محدوده کور
حتی بهترین ترانسمیتر راداری، اگر بهاشتباه نصب شود، نتایج غیرقابل قبول خواهد داد. موارد حیاتی نصب مکانیکی:
الف — انتخاب موقعیت نازل:
- نازل نباید در امتداد مستقیم جریان ورودی (Filling Pipe) قرار بگیرد. فاصله توصیهشده: حداقل ۳۰۰–۵۰۰ میلیمتر از دهانه لوله ورودی.
- در مخازن استوانهای افقی (Horizontal Vessel)، نازل باید در بالاترین نقطه قرار داشته باشد و از سرریز یا نقطهای که ممکن است سیال روی آنتن بپاشد، دور باشد.
- برای رادار ۸۰ گیگاهرتز، حداقل فاصله مرکز نازل از دیوار داخلی: حدود ۵۰–۱۵۰ میلیمتر (بسته به قطر پرتو آنتن).
- آنتن باید عمود بر سطح مایع نصب شود. انحراف بیشتر از ۵ درجه از عمود میتواند بازتاب را به طرف دیوار مخزن منحرف کرده و از شدت سیگنال بکاهد.
ب — محدوده کور (Dead Zone / Blanking Distance):
در پایین دستگاه، یک منطقه وجود دارد که دستگاه قادر به اندازهگیری در آن نیست. این محدوده به دو دلیل وجود دارد:
اول — بازگشت انرژی از لبه آنتن که سیگنالی قویتر از سیگنال سطح ایجاد میکند.
دوم — عدم پردازش الکترونیکی در زمان بلافاصله بعد از ارسال پالس.
برای ترانسمیترهای ۲۶ گیگاهرتز: Dead Zone معمولاً ۰.۳–۰.۵ متر. برای ۸۰ گیگاهرتز: Dead Zone کوچکتر، اغلب ۰.۱–۰.۲ متر.
پارامتر Upper Limit (Upper Blocking Distance) و Lower Limit: در کالیبراسیون نرمافزاری، دو پارامتر اساسی تنظیم میشوند:
Empty Calibration (Lower Calibration Point): فاصله از روی آنتن تا کف مخزن — یعنی وقتی مخزن خالی است، دستگاه در این فاصله اندازهگیری میکند.
Full Calibration (Upper Calibration Point): فاصله از روی آنتن تا سطح زمانی که مخزن پر است.
این دو نقطه کالیبراسیون، خروجی آنالوگ ۴mA و ۲۰mA را بهترتیب برای Empty و Full تعریف میکنند.
ج — اندازه نازل:
برای رادار ۲۶ گیگاهرتز با آنتن بوق استاندارد: نازل حداقل ۴ اینچ. برای رادار ۸۰ گیگاهرتز: میتوان از نازل ۱.۵ اینچ و حتی ۱ اینچ استفاده کرد. طول نازل نیز مهم است — نازلهای بلند (بیشتر از ۱۵۰ میلیمتر) اگر قطرشان کافی نباشد، عمل موجبر را میکنند و پرتو را پراکنده میسازند.
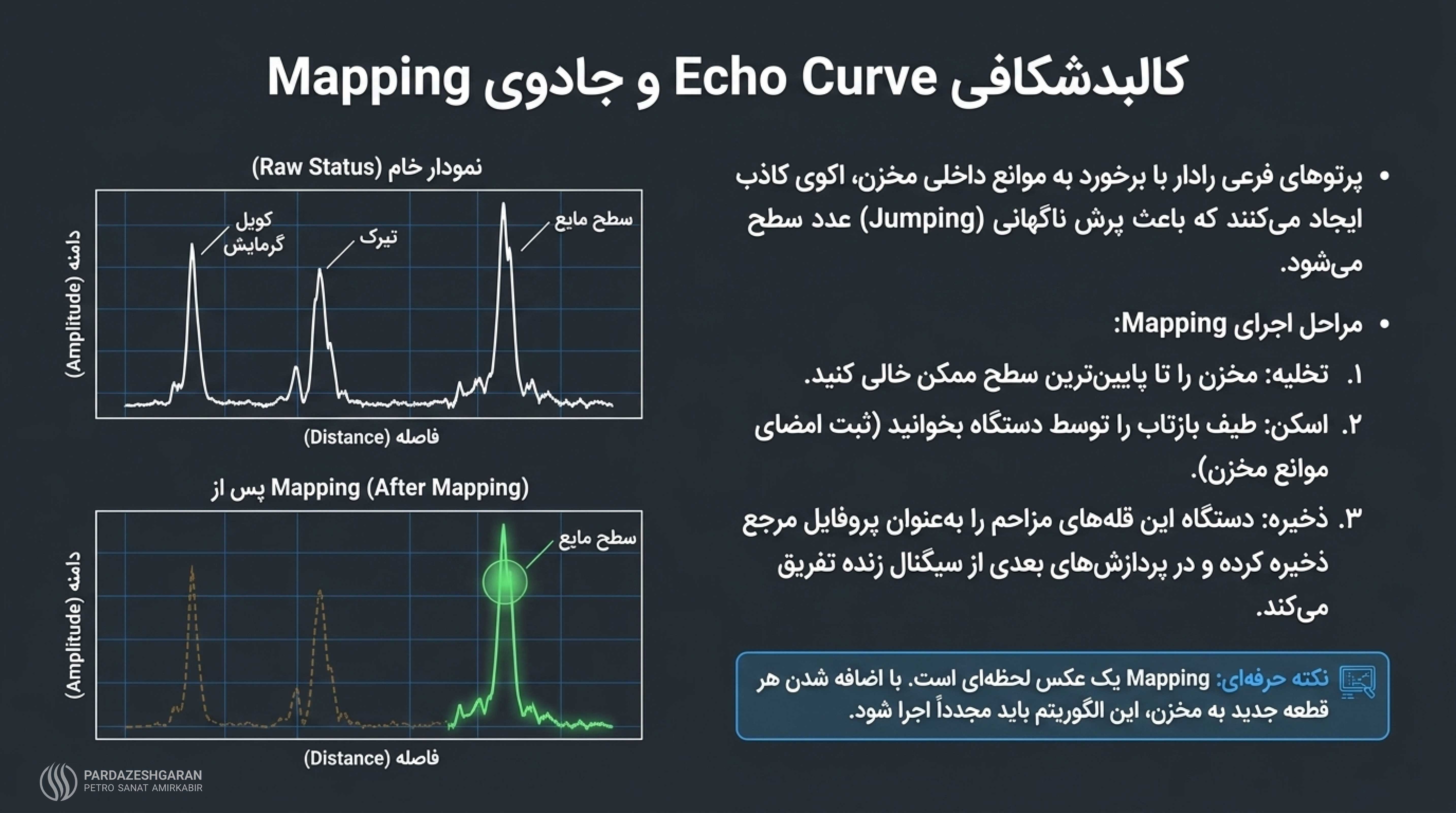
پدیده اکوی کاذب (False Echo) و الگوریتم Mapping
اکوی کاذب (False Echo) — که به آن Phantom Echo یا Spurious Echo هم میگویند — یکی از اساسیترین مسائل در عمل سطحسنجهای راداری است. درک عمیق این پدیده برای هر تکنسین سایت یا مهندس ابزار دقیق الزامی است.
علت فیزیکی اکوی کاذب:
پرتو رادار که از آنتن ارسال میشود، یک پرتو کاملاً متمرکز نیست — همیشه یک پرتو فرعی (Side Lobe) وجود دارد که در زوایای کناری انرژی میفرستد. در مخازنی که دارای موانع داخلی هستند — لولههای گرمایش (Heating Coils)، تیرکهای تقویتی (Stiffener Rings)، لولههای پرکننده (Fill Pipes)، همزنها، ترموولها و لولههای خروجی — این پرتوهای فرعی از سطوح جانبی بازمیگردند.
دستگاه این بازتابها را بهعنوان «سطح مایع در فاصله مشخص» تفسیر میکند. اگر سطح واقعی مایع در همان فاصله تقریبی باشد، تداخل اکوی کاذب و سیگنال واقعی منجر به پرش (Jumping) سطح نشاندادهشده میشود.
- HART Field Communicator (مثلاً Emerson FC-475 یا Fluke 744): قابل حمل، برای کار مستقیم روی سایت
- نرمافزار AMS Device Manager (Emerson): برای مدیریت یکپارچه از کنترلخانه
- PACTware با DTM مربوطه: رایگان و چندسازندهای، برای اکثر برندهای ترانسمیتر
- نرمافزار اختصاصی سازنده: مثل FieldCare (E+H)، PDM (Siemens)، AMS (Emerson)
ساختار یک Echo Curve بهینه:
یک Echo Curve سالم در یک مخزن بدون مانع و با سطح مایع در ارتفاع نرمال باید دارای ویژگیهای زیر باشد:
- یک پیک اصلی قوی و مشخص در فاصله متناظر با سطح واقعی مایع
- عدم وجود پیکهای قوی دیگر در ناحیه بین Dead Zone و سطح مایع
- کاهش تدریجی نویز در فاصلههای دور از آنتن
- شدت پیک اصلی حداقل ۱۵–۲۰ دسیبل بالاتر از نویز پسزمینه (SNR کافی)
سناریوهای رایج Echo Curve غیرعادی:
سناریو اول — پیک اضافی نزدیک به آنتن:
اگر در ناحیه ۰.۵ تا ۱.۵ متر از آنتن، یک پیک بزرگ وجود داشته باشد در حالی که سطح واقعی مایع بسیار پایینتر است، این نشانه رسوب روی آنتن یا کنساسیون بخار در آنتن است. راهحل: بازرسی فیزیکی آنتن در بازرسی بعدی مخزن.
سناریو دوم — پیکهای متعدد با شدت یکسان:
وجود چندین پیک با شدت مشابه، نشانه وجود موانع متعدد داخل مخزن است. در این حالت، الگوریتم ردیابی هدف ممکن است در شناسایی سطح واقعی دچار اشتباه شود. راهحل: اجرای Mapping دقیق و در صورت لزوم، جابهجایی نازل دستگاه.
سناریو سوم — پیک اصلی کمشدت:
اگر پیک متناظر با سطح مایع شدت بسیار کمی (کمتر از ۱۰ دسیبل SNR) داشته باشد، دستگاه به «Loss of Echo» نزدیک است. احتمالترین علل: Dk پایین سیال، کف روی سطح، یا آنتن کثیف.
سناریو چهارم — پیک اصلی ناگهانی جابهجا میشود:
این پدیده معروف به «Echo Jumping» نشانه رقابت بین دو پیک با شدت نزدیک به هم است. وقتی سطح مایع در حال تغییر است و به نزدیکی یک مانع داخلی میرسد، پیک مانع و پیک سطح مایع میتوانند همپوشانی پیدا کنند.
کالیبراسیون گامبهگام — راهنمای عملی برای مهندس سایت
کالیبراسیون یک ترانسمیتر سطح راداری جدید، یا کالیبراسیون مجدد پس از تعمیر یا تعویض مخزن، باید بهصورت سیستماتیک انجام شود. در ادامه یک دستورالعمل گامبهگام برای کالیبراسیون با HART Communicator ارائه میشود:
پیشنیازهای کالیبراسیون:
- نقشه مخزن با مشخصات دقیق: ارتفاع کل، ارتفاع نازل، فاصله نازل تا کف (Datum Plate)
- اطلاعات سیال: نوع، دمای عملیاتی، و ثابت دیالکتریک تقریبی
- HART Communicator یا لپتاپ با نرمافزار پیکربندی و HART modem
- اجازه دسترسی به مخزن در یک وضعیت عملیاتی شناختهشده (ترجیحاً مخزن خالی یا با سطح شناختهشده)
مرحله اول — پیکربندی اولیه دستگاه (Initial Setup):
ابتدا اطلاعات پایه را در دستگاه وارد کنید:
- Tag Name: شناسه ابزار دقیق مطابق P&ID (مثلاً «LIT-1201-A»)
- Antenna Type: نوع آنتن نصبشده را از منوی دستگاه انتخاب کنید. انتخاب اشتباه نوع آنتن مستقیماً Dead Zone و حساسیت را تغییر میدهد.
- Media (Dielectric Constant): نوع ماده یا Dk تقریبی را وارد کنید. در اکثر دستگاهها یک پایگاه داده از مواد رایج موجود است.
- Vessel Shape: شکل مخزن (استوانه عمودی، افقی، مخروطی، کروی) را وارد کنید. این اطلاعات برای محاسبه حجم (volume calculation) استفاده میشود.
- Nozzle Length: طول نازلی که دستگاه روی آن نصب شده. این مقدار در محاسبه Dead Zone موثر است.
مرحله دوم — تنظیم Empty و Full Calibration:
این دو پارامتر اساسیترین بخش کالیبراسیون هستند:
Empty Calibration (E = فاصله از آنتن تا کف مخزن):
این مقدار باید برابر فاصله واقعی از صفحه مرجع آنتن تا نقطه Zero مخزن (معمولاً کف یا Datum Plate) باشد. برای اندازهگیری دقیق، از نقشه مخزن (Tank Sketch) یا اندازهگیری فیزیکی استفاده کنید. در دستگاههایی که آنتن روی نازل نصب میشود، باید طول نازل را به فاصله از آنتن تا کف اضافه کنید.
مثال: اگر ارتفاع مخزن ۱۰ متر است، نازل ۲۰۰ میلیمتر طول دارد، و دستگاه ۱۵۰ میلیمتر درون نازل قرار میگیرد، فاصله E = 10 + 0.200 – 0.150 = 10.050 متر.
Full Calibration (F = فاصله از آنتن به حالت مخزن پر):
این مقدار حداقل فاصلهای است که دستگاه باید اندازه بگیرد — یعنی وقتی مخزن کاملاً پر است. باید حداقل ۱۰۰–۲۰۰ میلیمتر بیشتر از Dead Zone دستگاه باشد تا از ورود سطح مایع به ناحیه غیرقابل اندازهگیری جلوگیری شود.
مرحله سوم — اجرای Mapping (نقشهبرداری اکوی کاذب):
مراحل دقیق اجرای Mapping:
گام ۱: مخزن را به پایینترین سطح ممکن تخلیه کنید. هرچه سطح مایع پایینتر باشد، تمام موانع داخلی بیشتر در معرض دید آنتن هستند و Mapping جامعتری انجام میشود.
گام ۲: در HART Communicator به مسیر Configure → Guided Setup → Mapping بروید (مسیر بسته به سازنده متفاوت است).
گام ۳: محدوده Mapping را وارد کنید:
- Start Distance: معمولاً ۰ (از آنتن)
- End Distance: سطح فعلی مایع + ۵۰۰ میلیمتر (برای پوشش کامل ناحیه بدون مایع)
گام ۴: دستور «Record Mapping» یا «Confirm Mapping» را اجرا کنید. دستگاه ۱۵ تا ۳۰ ثانیه طول میکشد تا طیف را کامل بخواند و ذخیره کند.
گام ۵: وضعیت «Mapping Active» را در دستگاه تأیید کنید و Echo Curve را مشاهده کنید. باید پیکهای ناشی از موانع داخلی حالا فشردهتر (suppressed) دیده شوند.
گام ۶: مخزن را کمی پر کنید و بررسی کنید که پیک سطح مایع در موقعیت صحیح و با شدت کافی ظاهر میشود.
مرحله چهارم — تنظیم خروجی آنالوگ:
خروجی ۴–۲۰mA باید بهدرستی تعریف شود:
- ۴mA (Lower Range Value / LRV): متناظر با مخزن خالی (Empty Calibration Point) یا حداقل سطح عملیاتی
- ۲۰mA (Upper Range Value / URV): متناظر با مخزن پر (Full Calibration Point) یا حداکثر سطح عملیاتی
- ALARM Mode: تعیین کنید که در صورت خطای اندازهگیری، خروجی به ۳.۶mA (Failsafe Low) یا ۲۱mA (Failsafe High) برود. معمولاً برای سیستمهای High Level Alarm، Failsafe High انتخاب میشود تا خطا مانند پر شدن مخزن تفسیر شود.
مرحله پنجم — تست عملکرد نهایی:
پس از کالیبراسیون، تستهای نهایی:
- با یک روش مستقل (شاخص دیداری، Tape Measurement) سطح واقعی مخزن را اندازه بگیرید و با PV دستگاه مقایسه کنید. انحراف باید در محدوده مشخصات فنی دستگاه باشد.
- در حین تغییر سطح مخزن، پاسخ دستگاه را تأیید کنید — آیا خروجی آنالوگ بهصورت خطی با سطح تغییر میکند؟
- وضعیت HART را بررسی کنید — آیا پیام خطا یا هشداری وجود دارد؟
- اطلاعات نهایی کالیبراسیون را در Loop Check Sheet ثبت کنید.
لاگهای واقعی کالیبراسیون — نمونههای مستند از سایت
برای روشنتر شدن فرایند، دو نمونه واقعی از گزارش کالیبراسیون در محیطهای صنعتی مختلف:
نمونه ۱ — مخزن ذخیره گازوئیل (Dk پایین):
Tag: LT-2304-A | Medium: Diesel (Dk=2.1) | Antenna: Horn 4" | Freq: 26GHz --- Empty Cal (E): 12.350 m (tank height 12.0m + nozzle 350mm) Full Cal (F): 0.300 m (min 300mm from antenna = dead zone limit) Damping: 10 sec (low turbulence storage tank) Mapping Range: 0 - 11.8m (tank empty at 50mm level) --- BEFORE Mapping: Echo Curve shows 3 false echoes at 2.1m, 5.8m, 8.2m (heating coils) AFTER Mapping: False echoes suppressed. Main echo at 11.52m = 0.83m liquid level ✓ Verification: Manual tape = 830mm, Device PV = 828mm, Error = 2mm ✓ (within spec) --- Output: 4mA @ 0mm, 20mA @ 12000mm | Failsafe: High (21mA)
نمونه ۲ — راکتور پلیمریزاسیون (دمای بالا، همزندار):
Tag: LT-1102-B | Medium: Polymer slurry (Dk≈3.5) | Antenna: Flush/Planar | Freq: 80GHz --- Empty Cal (E): 4.200 m (reactor height 4.0m + nozzle 200mm) Full Cal (F): 0.150 m (80GHz dead zone = 150mm) Damping: 20 sec (agitator creates severe turbulence) Stilling Well: Installed (dia 100mm, sealed at bottom with perforations) --- NOTE: Agitator creates strong false echoes without stilling well. With stilling well: Echo Curve shows single clean peak at reactor level. SNR = 24dB (well above 10dB threshold) ✓ Verification: DP Level (LT-1102-A) reads 2.35m, Radar reads 2.33m, Δ=20mm ✓ --- Mapping: Performed with reactor at minimum level (200mm) False echoes from reactor wall fittings: 1.2m, 2.8m → suppressed Output: 4mA @ 0%, 20mA @ 100% (0-4000mm) | Failsafe: Low (3.6mA)
این لاگها نشان میدهند که یک تکنسین حرفهای نهتنها پارامترهای نهایی را ثبت میکند، بلکه تاریخچه فرایند کالیبراسیون، وضعیت قبل و بعد از Mapping، و نتایج تأییدیه مستقل را نیز مستند میسازد.
کالیبراسیون دورهای (Periodic Calibration): چه زمانی و چگونه؟
بسیاری از مهندسان این سوال را دارند: «ترانسمیتر راداری که یکبار کالیبره شده، آیا نیاز به کالیبراسیون مجدد دارد؟»
پاسخ بستگی به کاربرد دارد:
کاربردهای ایمنی (SIL): در ترانسمیترهایی که در سیستمهای Safety Instrumented (SIS) استفاده میشوند، استاندارد IEC 61511 الزامات دقیقی برای آزمون دورهای (Proof Test) دارد. فاصله بین آزمونها (Proof Test Interval) بسته به نرخ خرابی دستگاه (PFD) و سطح SIL، معمولاً یک تا چهار سال است.
کاربردهای Custody Transfer (تبادل مالکیت): مطابق استاندارد OIML R85 و API 3.1B، ترانسمیترهای سطح مخازن Custody Transfer باید سالانه کالیبره شده و گواهی ردیابیپذیر به استانداردهای ملی داشته باشند.
کاربردهای عادی فرایندی: اگر ترانسمیتر در کاربرد ایمنی یا Custody Transfer نباشد، کالیبراسیون مجدد معمولاً تنها در این موارد لازم است: تغییر نوع سیال در مخزن، تغییر ساختار داخلی مخزن، تعویض آنتن یا الکترونیک دستگاه، یا انحراف قابل توجه مشاهدهشده از روش مستقل.
جدول عیبیابی حرفهای برای تکنسینهای سایت
| علامت مشکل | علت یا علل احتمالی | تشخیص | اقدام اصلاحی |
|---|---|---|---|
| خروجی ثابت روی ۴mA (نشانگر Empty) | کالیبراسیون نادرست Empty؛ سطح واقعی در Dead Zone؛ سیگنال برگشتی بسیار ضعیف (Dk پایین) | Echo Curve را بررسی کنید — آیا هیچ پیک معناداری وجود دارد؟ | Empty Calibration را بررسی و اصلاح کنید؛ آنتن بزرگتر یا حساسیت بیشتر؛ نوع پروب را بررسی کنید |
| خروجی ثابت روی ۲۰mA (نشانگر Full) | کالیبراسیون نادرست Full؛ اکوی کاذب در ناحیه Dead Zone (سیگنال نزدیک آنتن)؛ رسوب روی آنتن | Echo Curve — پیک قوی نزدیک آنتن نشانه رسوب یا اکوی کاذب Dead Zone است | آنتن را تمیز کنید؛ Dead Zone/Blanking Distance را افزایش دهید؛ Full Calibration را اصلاح کنید |
| پرش (Jumping) بین دو مقدار | اکوی کاذب از مانع داخلی مخزن؛ تلاطم شدید سطح؛ الگوریتم Tracking نامناسب | Echo Curve — آیا دو پیک همشدت در نزدیکی هم وجود دارند؟ | Mapping را اجرا کنید؛ پارامتر Damping را افزایش دهید؛ از لوله آرامش استفاده کنید |
| نویز زیاد و ناپایداری خروجی | تلاطم شدید سطح؛ کف؛ بخار غلیظ؛ تداخل الکترومغناطیسی (EMI) از منابع خارجی | Damping Time Constant را موقتاً افزایش دهید — آیا بهبود مییابد؟ | Damping را تنظیم کنید؛ لوله آرامش نصب کنید؛ منابع EMI نزدیک را بررسی کنید؛ کابلکشی را بررسی کنید |
| خطای اندازهگیری منظم (+X سانتیمتر) | کالیبراسیون انجامنشده؛ اشتباه در اندازه نازل وارد شده؛ Dk تنظیمشده با واقعیت تفاوت دارد (در GWR) | مقدار واقعی سطح را با روش مستقل (مثلاً شاخص دیداری) اندازه بگیرید و با PV دستگاه مقایسه کنید | Offset را اصلاح کنید؛ کالیبراسیون مجدد انجام دهید؛ ارتفاع نازل را بررسی کنید |
| پیامهای خطای تشخیصی (Diagnostic Alarm) | بسته به کد خطا: منبع تغذیه پایینتر از ۱۴V (برای HART Loop)؛ دمای محیط خارج از بازه؛ شکست سختافزاری | کد NAMUR NE107 را در نرمافزار پیکربندی بخوانید | ولتاژ تغذیه را اندازه بگیرید؛ دمای هوزینگ را بررسی کنید؛ اگر Sensor Failure است، دستگاه را تعویض کنید |
| تفاوت با ابزار مستقل (مثلاً DP Level) | نقطه صفر (Zero Point) یا اسپن (Span) یکی از دو دستگاه اشتباه است؛ تفاوت رفرنسپوینتها | هر دو دستگاه را با سطح فیزیکی مستقل (شاخص سایت) مقایسه کنید | کالیبراسیون هر دو دستگاه را بهصورت مستقل تایید کنید |
| از دست رفتن سیگنال پس از تعویض سیال | Dk سیال جدید بسیار پایینتر از سیال قبلی است و سیگنال بازگشتی کافی نیست | Dk سیال جدید را بررسی کنید — آیا از حداقل Dk دستگاه بیشتر است؟ | به GWR تغییر دهید؛ یا آنتن بزرگتر استفاده کنید؛ یا حساسیت گیرنده را افزایش دهید |
| رسوب و آلودگی روی آنتن | سیال ویسکوز، بخار متراکمشونده یا جامدات معلق | بازرسی فیزیکی آنتن هنگام بازرسی مخزن | Air Purge را در نصب تعبیه کنید؛ آنتن PTFE بلندتر انتخاب کنید؛ برنامه تمیزکاری دورهای تعریف کنید |

۸. تحول بومیسازی: پتروصنعت امیرکبیر و استقلال فناورانه ایران
اثر تحریم بر صنعت ابزار دقیق ایران
صنعت نفت، گاز و پتروشیمی ایران، در دهههای گذشته عمیقاً به تجهیزات وارداتی از برندهای بینالمللی مانند Emerson Rosemount، VEGA، Endress+Hauser، ABB و Siemens وابسته بود. این وابستگی در دوران تشدید تحریمهای بینالمللی از سال ۱۳۹۰ به بعد، به یک بحران عملیاتی جدی تبدیل شد.
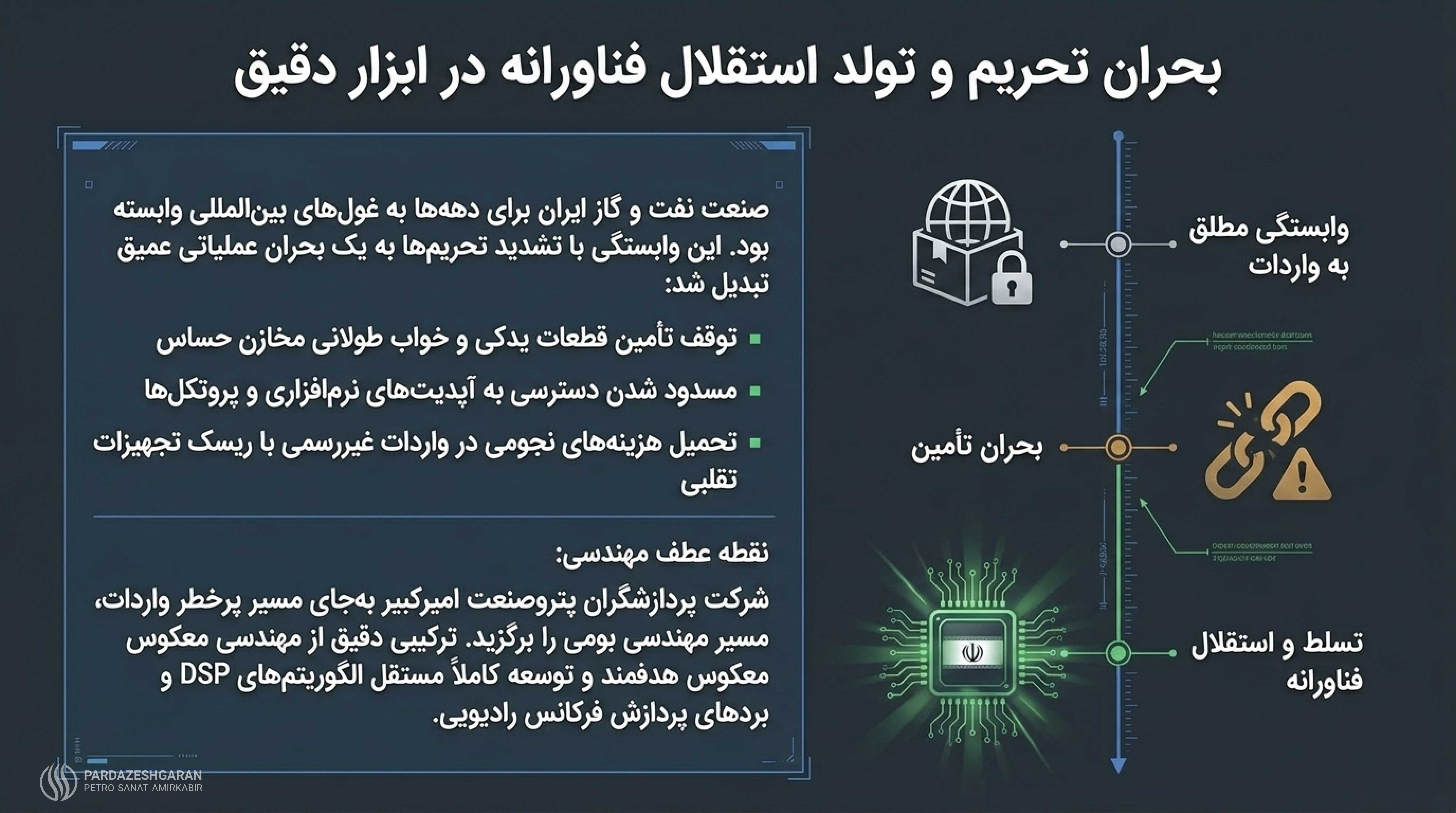
پتروصنعت امیرکبیر مسیر توسعه محصول را با دو رویکرد موازی طی کرد:
اول — مهندسی معکوس هدفمند (Targeted Reverse Engineering): تحلیل دقیق مدلهای پیشرو بینالمللی از نظر معماری سیستم، استانداردهای ایمنی، پروتکلهای ارتباطی و مشخصات مکانیکی. این مرحله دانش پایهای فراهم کرد که اجازه داد از «صفر مطلق» شروع نشود.
دوم — توسعه مستقل (Independent Development): طراحی مستقل برد پردازش سیگنال RF، توسعه الگوریتمهای FMCW و FFT بومی، و طراحی محفظههای مقاوم به انفجار (Ex-d) بر اساس استاندارد IECEx و ATEX که برای محیطهای Zone 1 و Zone 2 الزامی است.
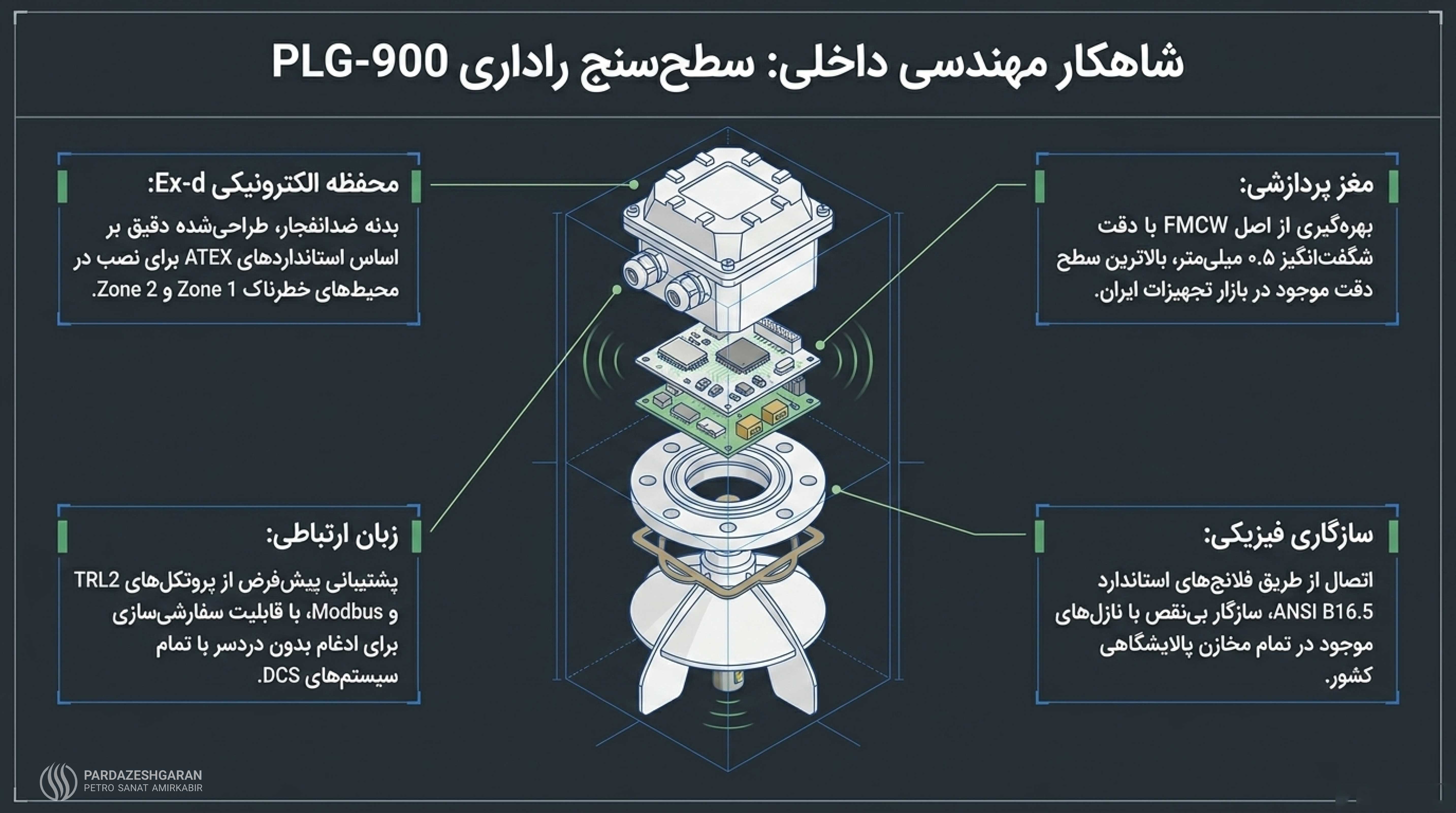
مشخصات کلیدی محصول بومی:
ترانسمیترهای سطح راداری تولیدشده توسط تولیدکننده سطحسنج راداری پتروصنعت امیرکبیر، در دستهبندیهای ۲۶ و ۸۰ گیگاهرتز عرضه میشوند و مشخصات فنی کلیدی زیر را دارند:
| مشخصه | مقدار | توضیحات |
|---|---|---|
| مدل | PLG-900 | سطحسنج راداری FMCW |
| دقت اندازهگیری | ۰.۵ میلیمتر | بالاترین دقت موجود در بازار ایران |
| اصل کارکرد | FMCW (Frequency Modulated Continuous Wave) | امواج الکترومغناطیسی با فرکانس متغیر |
| پروتکل ارتباطی پیشفرض | TRL2 (مدباس / Modbus) | سازگار با اکثر سیستمهای DCS و SCADA |
| پروتکلهای سفارشی پشتیبانیشده | BPM، V1، Salcura، WM550 | قابلیت ادغام با سیستمهای کنترل اختصاصی |
| نوع محفظه الکترونیکی | ضدانفجار (Explosion Proof) | مناسب برای محیطهای خطرناک Zone 1 و Zone 2 |
| کاربردهای اصلی | مخازن نفت خام، فرآوردههای نفتی، مواد شیمیایی، دارویی، غذایی | از جمله عملیات تبادل مالکیت (Custody Transfer) |
| نیاز به تماس با سیال | خیر — اندازهگیری بدون تماس | عدم آلودگی محصول و بدون نیاز به باز کردن مخزن |
| سیستمهای کنترل موجودی | قابل ادغام با ATG و Tank Farm Management | برای سیستمهای کنترل موجودی خودکار |
قابلیت کالیبراسیون کامل در ایران:
یکی از مهمترین دستاوردهای پتروصنعت امیرکبیر، ایجاد آزمایشگاه کالیبراسیون تخصصی برای این تجهیزات در داخل کشور است. این آزمایشگاه با استفاده از مخزن آزمایشی کالیبرهشده (Calibration Vessel)، امکان صدور گواهی کالیبراسیون ردیابیپذیر به استانداردهای ملی را فراهم میکند — چیزی که پیش از این، تنها از مراکز اروپایی قابل دریافت بود.
خدمات پشتیبانی و مهندسی پتروصنعت امیرکبیر
بومی بودن تنها در تولید خلاصه نمیشود. پتروصنعت امیرکبیر مجموعه کاملی از خدمات مهندسی را در کنار محصولات خود ارائه میدهد:
- خدمات طراحی (Engineering Services): انتخاب فناوری مناسب بر اساس شرایط فرایند، تهیه Data Sheet، و ارائه مشاوره برای تأسیسات جدید. تیم مهندسی با نقشه P&ID شما کار میکند و موقعیت بهینه نصب را تعیین میکند.
- نصب و راهاندازی (Commissioning): تیم متخصص میدانی برای نصب مکانیکی، اتصال الکتریکی، کالیبراسیون اولیه و Mapping کامل در سایت مشتری.
- کالیبراسیون دورهای (Periodic Calibration): با گواهی ردیابیپذیر به استانداردهای ملی ایران، مناسب برای ممیزیهای کیفی و الزامات HSE.
- تعمیر و بازسازی (Repair & Overhaul): تعمیر ترانسمیترهای معیوب — اعم از ساخت داخلی پتروصنعت یا برندهای خارجی — در کارگاه تجهیز شده.
- آموزش (Training): دورههای آموزشی تخصصی برای مهندسان ابزار دقیق؛ از مبانی نظری سطحسنجی راداری تا کالیبراسیون عملی با دستگاههای واقعی.
- مشاوره جایگزینی (Replacement Consulting): برای مخازنی که دستگاههای اروپایی یا آمریکایی خراب آنها قابل تأمین نیست، تیم فنی امکانسنجی جایگزینی با مدل PLG-900 را انجام میدهد — شامل بررسی سازگاری مکانیکی، پروتکل ارتباطی، و دقت اندازهگیری.
چرا PLG-900 جایگزین ایدهآل دستگاههای خارجی است؟
یکی از نگرانیهای معمول در جایگزینی دستگاههای خارجی با نمونه بومی، سازگاری با سیستمهای کنترل موجود است. PLG-900 با طراحی هوشمندانه خود این نگرانی را برطرف کرده است:
- پشتیبانی از پروتکل TRL2 که در سیستمهای Custody Transfer قدیمی (مانند Honeywell Enraf) استاندارد است — بدون نیاز به تغییر در سیستم مرکزی Tank Farm
- پشتیبانی از Modbus RTU که با اکثر PLCها و DCSهای ایرانی و خارجی سازگار است
- پروتکلهای سفارشی BPM، V1، Salcura و WM550 برای سیستمهای مخصوص
- فلانجهای استاندارد ANSI B16.5 که با نازلهای موجود در اکثر مخازن ایرانی سازگار است
بومیسازی ابزار دقیق: فراتر از صرفهجویی اقتصادی
خرید ترانسمیتر سطح بومی از پتروصنعت امیرکبیر تنها یک تصمیم اقتصادی نیست. این تصمیم معنایی فراتر دارد: استقلال فناورانه در یکی از حساسترین حوزههای زیرساختی کشور. با هر ترانسمیتر بومی که جایگزین نمونه وارداتی میشود، یک گره از زنجیره وابستگی گشوده میشود.
دانشی که در فرایند توسعه این محصول در تیم مهندسی ایرانی ایجاد شده، قابل مصادره توسط هیچ تحریمی نیست. این دانش — از طراحی مدار RF و الگوریتمهای DSP تا مکانیزمهای آببندی تحت فشار و آزمونهای ضدانفجاری — اکنون بخشی دائمی از سرمایه فناورانه کشور است.
چشمانداز توسعه: پتروصنعت امیرکبیر با تولیدکننده ایرانی سطحسنج راداری بودن، در حال گسترش خط تولید به مدلهای ۸۰ گیگاهرتز با قابلیت اندازهگیری Interface دو فاز، مدلهای با قابلیت SIL-2 تأییدشده و ترانسمیترهای یکپارچهشده با پروتکلهای IIoT (Industrial Internet of Things) است. هدف، نه صرفاً جایگزینی محصول خارجی، بلکه همگامی با خط مقدم فناوری جهانی در این حوزه است.
۸.۵ کاربرد ویژه: Custody Transfer و مدیریت مخازن (Tank Farm)
Custody Transfer چیست و چرا دقت بحرانی است؟
Custody Transfer (تبادل مالکیت تجاری) به فرایند اندازهگیری کمیت یا کیفیت مواد هنگام انتقال مالکیت بین دو طرف — مثلاً از پالایشگاه به شرکت توزیع، از مخزن به تانکر، یا از میدان نفتی به خط لوله — اطلاق میشود. در این کاربرد، هر میلیمتر خطا مستقیماً به ارزش مالی هزاران دلار معادل میشود.
بزرگترین مخازن ذخیرهسازی نفت خام (Floating Roof Tanks) حجمهایی تا ۱۵۰,۰۰۰ متر مکعب (حدود ۱ میلیون بشکه) دارند. در چنین مخزنی، یک خطای ۱ میلیمتر در اندازهگیری ارتفاع برابر ۴۷۰ تا ۵۰۰ لیتر اختلاف محاسبه است — که با قیمت نفت ۸۰ دلار در هر بشکه، حدود ۲۵۰ دلار خطای مالی در یک اندازهگیری ایجاد میکند. در طول یک سال با دهها تراکنش ماهانه، این خطا به چندصدهزار دلار میرسد.
بنابراین استانداردهای بینالمللی برای این کاربرد بسیار سختگیرانه هستند:
- API Manual of Petroleum Measurement Standards (MPMS) Chapter 3.1B: استاندارد آمریکایی برای سطحسنجی در مخازن بزرگ نفتی. حداکثر خطای مجاز کلی سیستم: ±۳ میلیمتر برای مخازن بزرگ.
- OIML R 85: استاندارد بینالمللی سازمان بینالمللی وزن و اندازهگیری برای گیجهای خودکار مخازن (ATG).
- EN 12405: استاندارد اروپایی برای ATG در ایستگاههای سوخت.
ترانسمیتر سطح راداری در کاربرد Custody Transfer:
برای کاربرد Custody Transfer، ترانسمیتر باید الزامات اضافی داشته باشد که از کاربرد معمولی سختگیرانهتر است:
- تأیید مترولوژیکی (Pattern Approval): دستگاه باید گواهی از یک مرجع تأیید صلاحیت مترولوژیکی داشته باشد.
- درجهبندی ارتفاعی (Height Calibration): کالیبراسیون باید با گواهی ردیابیپذیر به استانداردهای ملی انجام شود.
- جبرانسازی دمای مایع: تبدیل ارتفاع به حجم نیازمند جبرانسازی دمای مایع (Volume Correction Factor / VCF) است.
- اندازهگیری همزمان Temperature: اکثر سیستمهای Custody Transfer، سطحسنج راداری را با سیستم اندازهگیری پروفایل دمایی (Multi-Point Temperature Averaging) ترکیب میکنند.
سیستم مدیریت مخازن (Tank Farm Management System)
یک Tank Farm (مجموعه مخازن ذخیرهسازی) در پالایشگاهها، پایانههای نفتی و ذخایر استراتژیک، ممکن است دهها تا صدها مخزن داشته باشد. مدیریت دقیق این مخازن نیازمند یک سیستم یکپارچه است که معمولاً به آن Tank Inventory Management System (TIMS) یا Tank Gauging System میگویند.
ساختار معمول یک سیستم Tank Gauging:
- لایه اول (Field Level): ترانسمیترهای سطح راداری، سنسورهای دما، فشارسنجها روی هر مخزن
- لایه دوم (Field Control Unit): یک RTU یا Field Controller که دادههای چندین مخزن را جمعآوری میکند. اتصال معمولاً از طریق HART، Modbus یا Foundation Fieldbus است.
- لایه سوم (Tank Gauging Computer): نرمافزار مرکزی که حجم، جرم و ارزش موجودی را محاسبه و در قالب گزارش مالی ارائه میدهد. نرمافزارهای رایج: Emerson RosemountTankRadar Rex، VEGA VISIO، OPW Sievert.
- لایه چهارم (ERP Integration): اتصال به سیستمهای مالی و برنامهریزی منابع (SAP، Oracle)
پروتکلهای ارتباطی در Tank Farm:
در یک Tank Farm بزرگ، انتخاب پروتکل ارتباطی بین دستگاه و سیستم مرکزی اهمیت بسیار دارد:
- Modbus RTU/TCP: ساده، قابل اطمینان، پرکاربردترین در تأسیسات موجود. پشتیبانی گسترده از سوی همه سازندگان ترانسمیتر سطح.
- HART Multiplexer: امکان اتصال چندین دستگاه HART به یک پورت ارتباطی. هر دستگاه آدرس HART منحصربهفرد دارد (۰–۶۳).
- Wireless HART (IEC 62591): برای مخازن دور افتاده یا مخازنی که کابلکشی دشوار است. RSSI باید بهتر از −۸۰ dBm باشد.
- Enraf Protocol / TRL/2: پروتکل اختصاصی که در برخی سیستمهای Custody Transfer قدیمیتر (مانند Honeywell Enraf) استفاده میشود. ترانسمیترهای ایرانی پتروصنعت امیرکبیر (مدل PLG-900) از این پروتکل (TRL2) پشتیبانی میکنند، که امکان جایگزینی دستگاههای موجود را بدون تغییر سیستم مرکزی فراهم میکند.
اندازهگیری Floating Roof: چالش خاص مخازن سقف شناور
مخازن بزرگ ذخیره نفت خام اغلب از نوع Floating Roof Tank (مخزن با سقف شناور) هستند. در این مخازن، سقف روی سطح مایع شناور است و با آن بالا و پایین میرود. ترانسمیتر سطح راداری روی یک لوله ثابت بالای مخزن نصب میشود و سطح مایع را از طریق یک مجرا در سقف شناور میخواند.
چالشهای اندازهگیری در Floating Roof Tanks:
- سقف شناور خودش یک هدف بازتاب قوی است. دستگاه باید بین بازتاب سقف شناور (که متحرک است) و دیواره مخزن (ثابت) تفکیک کند.
- در بعضی مخازن، لوله راهنما (Stilling Well یا Gauge Pole) که دستگاه درون آن نصب میشود، اکوهای کاذب لوله ایجاد میکند.
- جمعشدن آب باران روی سقف شناور میتواند وزن اضافی ایجاد کند و بهاشتباه در اندازهگیری تأثیر بگذارد.
۸.۷ یکپارچهسازی با IIoT و Industry 4.0
نسل جدید ترانسمیترهای سطح راداری: هوشمند، متصل، خودتشخیص
صنعت ابزار دقیق در حال ورود به دوران جدیدی است که در آن سنسورها نهتنها اندازه میگیرند، بلکه «میفهمند»، «گزارش میدهند» و «پیشبینی میکنند». این تحول با نامهایی مثل IIoT (Industrial Internet of Things)، Industry 4.0 و Digital Twin شناخته میشود.
WirelessHART (IEC 62591):
در بسیاری از تأسیسات قدیمی، کابلکشی برای مخازن دور، روی بامها یا در مناطق انفجاری گران و پیچیده است. WirelessHART امکان ارسال داده از ترانسمیتر به سیستم مرکزی را بدون سیم میدهد. یک شبکه WirelessHART یک mesh network است که در آن هر دستگاه هم دادههای خود را ارسال میکند و هم بهعنوان relay برای دستگاههای دیگر عمل میکند.
Predictive Maintenance (تعمیر پیشگویانه):
ترانسمیترهای راداری مدرن دادههای تشخیصی غنی تولید میکنند که میتوانند برای پیشبینی خرابی استفاده شوند:
- پایش SNR در طول زمان: کاهش تدریجی SNR نشانه رسوب روی آنتن است — میتوان قبل از از کار افتادن دستگاه، برنامه تمیزکاری ترتیب داد.
- پایش دمای الکترونیک: دمای غیرعادی میتواند نشانه گرمای اضافی در هوزینگ یا مشکل در خنککننده باشد.
- پایش کیفیت پژواک (Echo Quality): کاهش کیفیت Echo در طول زمان میتواند نشانه تغییر در شرایط مخزن باشد.
Digital Twin (دوقلوی دیجیتال):
مفهوم Digital Twin برای مخازن بزرگ، یعنی ایجاد یک مدل دیجیتال کامل از هر مخزن شامل شکل هندسی، موانع داخلی، خواص سیال، تاریخچه اندازهگیری و الگوهای رفتاری. این مدل میتواند برای:
- بهینهسازی Mapping بدون نیاز به تخلیه مخزن
- پیشبینی رفتار Echo Curve تحت شرایط مختلف عملیاتی
- شبیهسازی اثر تغییرات آرایش داخلی مخزن قبل از اجرا
۹. پرسشهای متداول مهندسان ابزار دقیق
آیا سطحسنج راداری برای اندازهگیری سطح گاز مایع (LPG) مناسب است؟
چرا خروجی ترانسمیتر راداری در هنگام پرشدن مخزن با سرعت زیاد ناپایدار میشود؟
تفاوت دقیق HART 5، HART 6 و HART 7 در پیکربندی ترانسمیتر سطح راداری چیست؟
آیا میتوان دو سطحسنج راداری را روی یک مخزن نصب کرد بدون اینکه به هم تداخل بدهند؟
چگونه Mapping کامل سطحسنج راداری را بهدرستی انجام دهم؟
تفاوت سطحسنج راداری ۲۶ گیگاهرتز با ۸۰ گیگاهرتز در عمل چیست؟
چه زمانی از Stilling Well (لوله آرامش) استفاده کنیم؟
آیا سطحسنج راداری میتواند جامدات دانهای (پودر، دانهدانه) را اندازه بگیرد؟
هزینه نگهداری سطحسنج راداری در مقایسه با اولتراسونیک واقعاً چقدر کمتر است؟
جمعبندی: چرا رادار، چرا بومی
این مقاله از یک سوال ساده آغاز شد: چرا در صنایع فرایندی، سطحسنج راداری به استاندارد تبدیل شده است؟ پاسخ در سه کلمه خلاصه میشود: دقت، قابلیت اطمینان، و تطبیقپذیری.
فناوری FMCW با امواج الکترومغناطیسی در ۸۰ گیگاهرتز، محدودیتهای فیزیکی ذاتی تمام تکنولوژیهای پیشین را پشت سر گذاشته است. نه از بخار متأثر میشود، نه به چگالی سیال وابسته است، نه به تماس فیزیکی نیاز دارد و نه با تغییر دما دقت را از دست میدهد.
از مراحل نصب صحیح مکانیکی و انتخاب موقعیت نازل بهینه، تا الگوریتمهای پردازش سیگنال FMCW، اکوی کاذب و فرایند Mapping، کالیبراسیون دقیق و عیبیابی میدانی — تمام این دانش فنی در این مقاله بهصورت یکپارچه گردآوری شده است. آنچه یک مهندس ابزار دقیق در طول سالها تجربه میدانی فرامیگیرد، اینجا در قالب یک مرجع فنی جامع در دسترس است.
و در ایران امروز، این فناوری دیگر انحصار برندهای خارجی نیست. تولیدکننده سطحسنج راداری ایرانی در شخص شرکت پردازشگران پتروصنعت امیرکبیر، با سالها تلاش مهندسی، دانش طراحی و تولید این تجهیزات پیچیده را بومی کرده است.
سطحسنج راداری PLG-900، محصول این تلاش چندینساله، با دقت ۰.۵ میلیمتری، پشتیبانی از پروتکلهای TRL2 (مدباس)، BPM، V1، Salcura و WM550، محفظه ضدانفجار استاندارد، و توانایی اندازهگیری در سختترین شرایط صنعتی، راهکاری است که نهتنها از نظر اقتصادی مقرونبهصرفه است، بلکه وابستگی زنجیره تأمین ابزار دقیق کشور را به واردات قطع میکند.
برای مشاوره فنی رایگان، خرید سطحسنج راداری PLG-900 یا دریافت پیشنهاد فنی-مالی برای پروژهتان، با تیم مهندسی پتروصنعت امیرکبیر در ارتباط باشید.

نظری برای این وجود ندارد.